
前回はタミヤの「カムプログラムロボット工作セット」にarduinoを載せてみましたが、今回はmicro:bitを載せてみたいと思います
2台のmicro:bitでの無線通信は以下の方法で行いました
用意するもの
- カムプログラムロボット工作セット
- micro:bit 2台
- SparkFun moto:bit
- 9V電池と電池スナップDCプラグアダプタ(センタープラス)
- 単四電池2本と電池ボックス
- ジャンパワイヤ(オス・オス)4本
カムプログラムロボット工作セット

カムを使ったプログラムの部品は使わないので取り外します
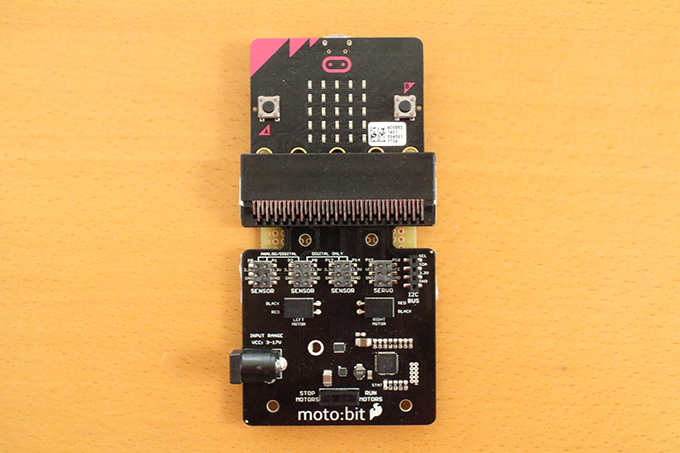
micro:bit 2台
1台は「カムプログラムロボット工作セット」に搭載、もう1台はコントローラーとして利用します。あらかじめプログラミングした動きで動作させるだけなら1台でOKです

SparkFun moto:bit
micro:bit用の拡張基板。モーター2個の他にもセンサーやサーボモーターも接続できる優れもの

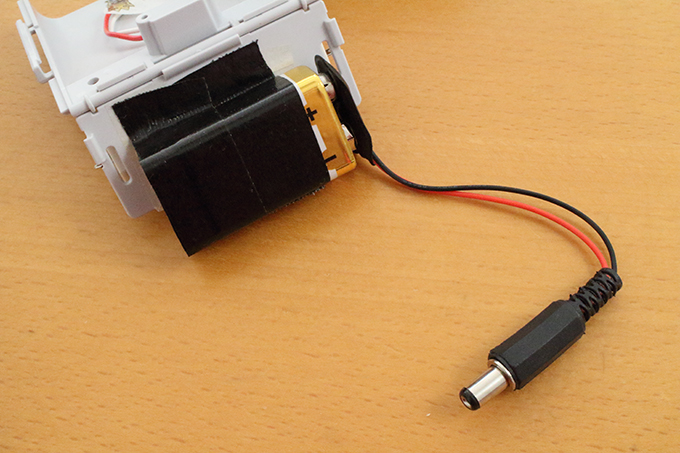
電池スナップDCプラグアダプタ
9V電池をmoto:bitのDCジャックに接続するのに使います

僕はArduinoのごちゃまぜセットに入っていたものを使いました

電池ボックス
電池ボックスは、コントローラーのmicro:bit用です。USBから電源を取る場合は必要ないです

ジャンパワイヤ(オス・オス)

接続
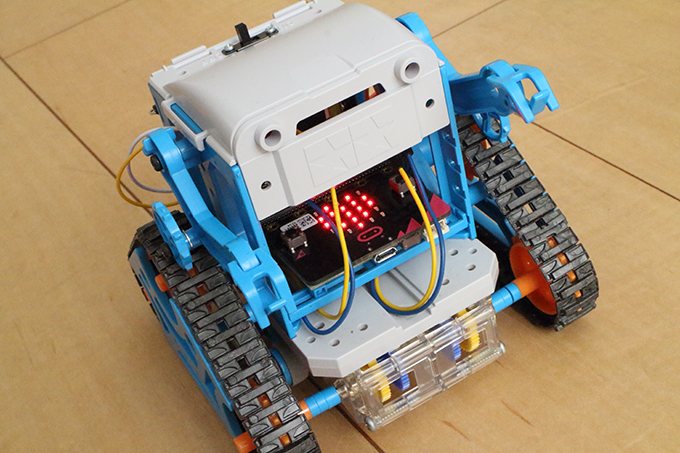
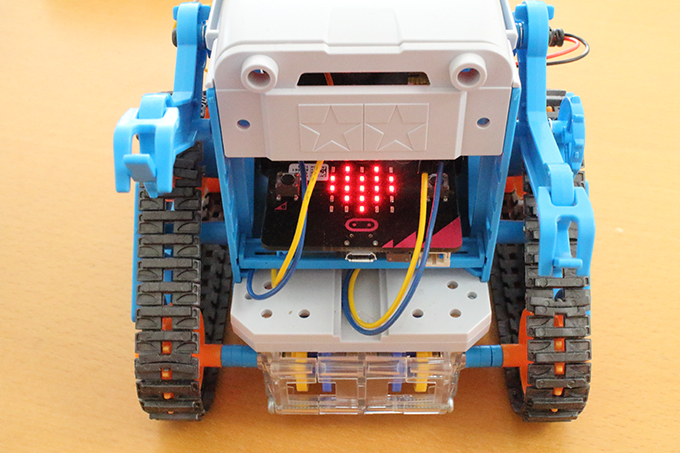
micro:bitをmoto:bitにサクッと挿します。ロボットに載せた時の安定感を高めるため、マスキングテープでユニバーサル基板を底面にくっつけました
9Vの電池は電池ボックスの裏側に貼り付けました。電池が重いのでしっかり貼り付けます
「カムプログラムロボット工作セット」のモーターのコードとジャンパワイヤ(オス・オス)の接続はStuduinoの時と同じく、ゴムパイプを使ってつなげました。以下の記事を参考にしてください
ジャンパワイヤの接続完了です
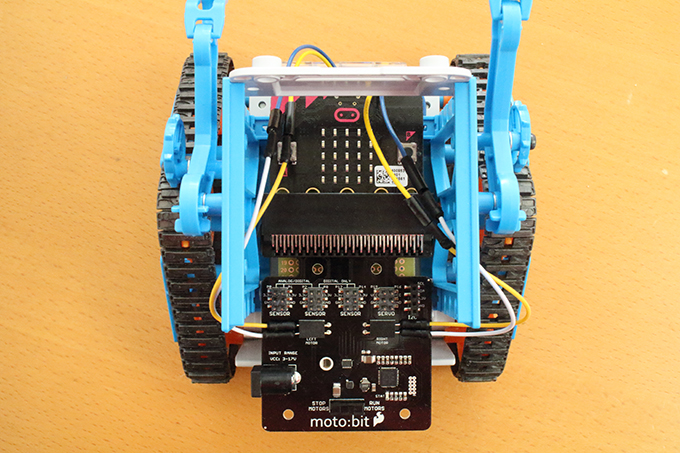
電池を貼り付けた上部のパーツを取り付けて、DCジャックをつなぎます。micro:bitの電源もここから取られます
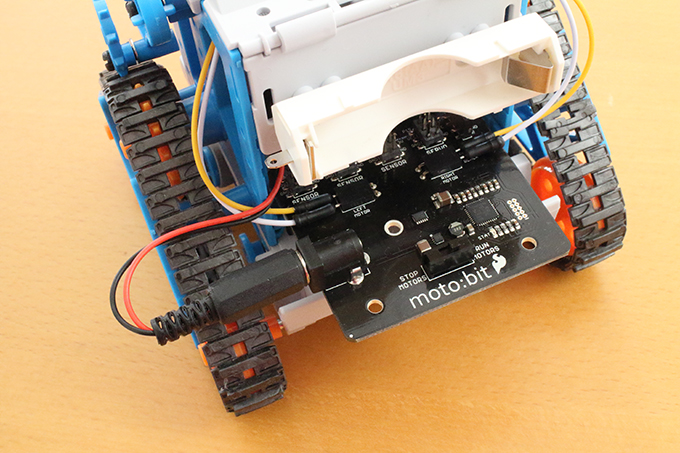
これで接続準備完了です
プログラムの作成
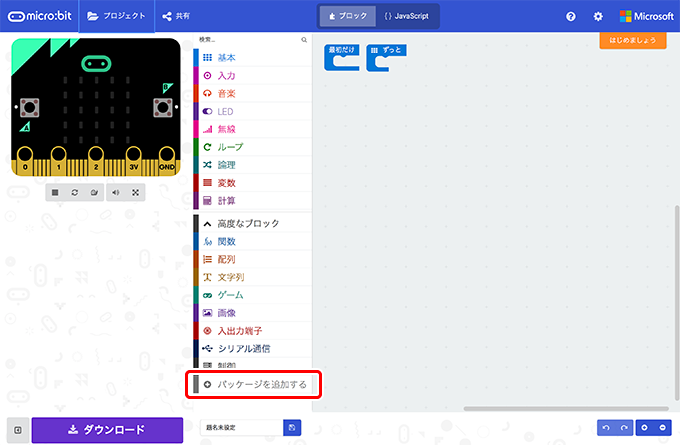
開発環境(JavaScript Block Editor)を開きます
moto:bitをコントロールするために、パッケージを追加します
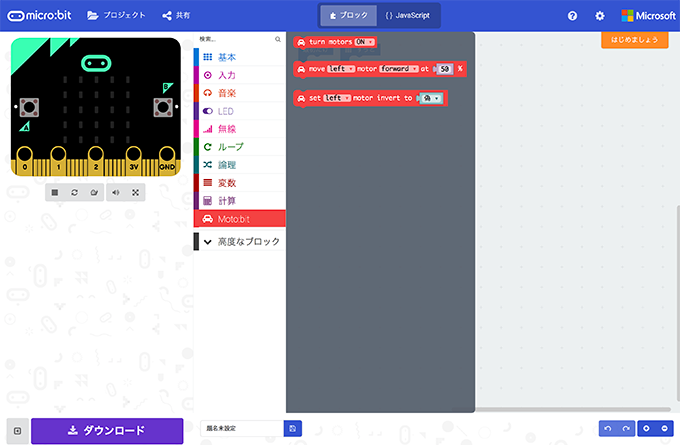
「moto-bit」で検索します。検索結果の「moto-bit」の方を選びます(説明文がweather:bitになっていますが間違いでしょう)

Moto:bitのブロックが追加されました
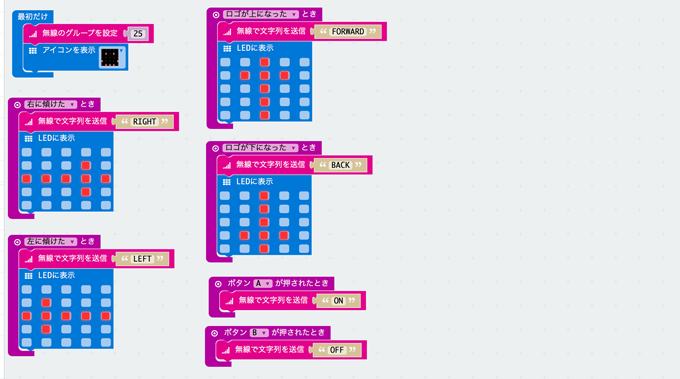
このようなプログラムを作りました
| コントローラー | ロボット |
|---|---|
| Aボタン | モーターON |
| Bボタン | モーターOFF |
| 端末を上に向ける | 前進 |
| 端末を下に向ける | 後進 |
| 端末を右に傾ける | 右回り |
| 端末を左に傾ける | 左回り |
端末の上下と進行方向の組み合わせは逆の方がよかったかもしれません。そこは各自調整してみてください
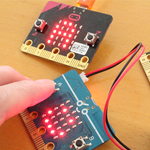
コントローラー側
端末の状態がわかるように、矢印を表示しています
moto-bit-controller – makecode.microbit.org
ロボット側
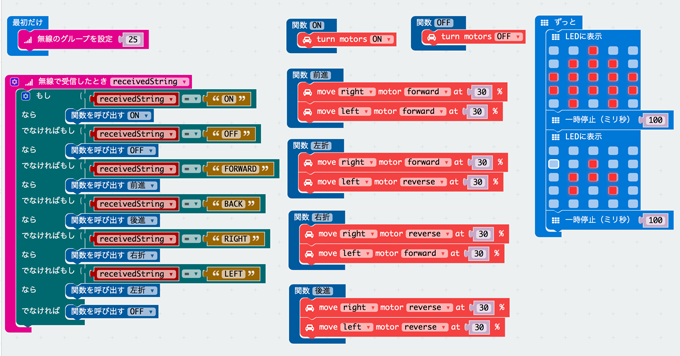
moto-bit-robot – makecode.microbit.org
ロボットの方は矢印を表示しても面白くないので、ハートがアニメーションするようにしてみました
こちらが動画です
自由に操作できるのは面白いです
[PR]





