

LEGO SPIKEで「ホッパー」と作ってみました。謎の生き物です。足のパーツを工夫して、より速く歩かせよう!というのが課題です
公式の教員向けのレッスンプランはこちらです
ホッパーレース
複数のプロトタイプを設計して、タイヤを使わないでロボットを動かす最も効果的な方法を見つけましょう。
education.lego.com
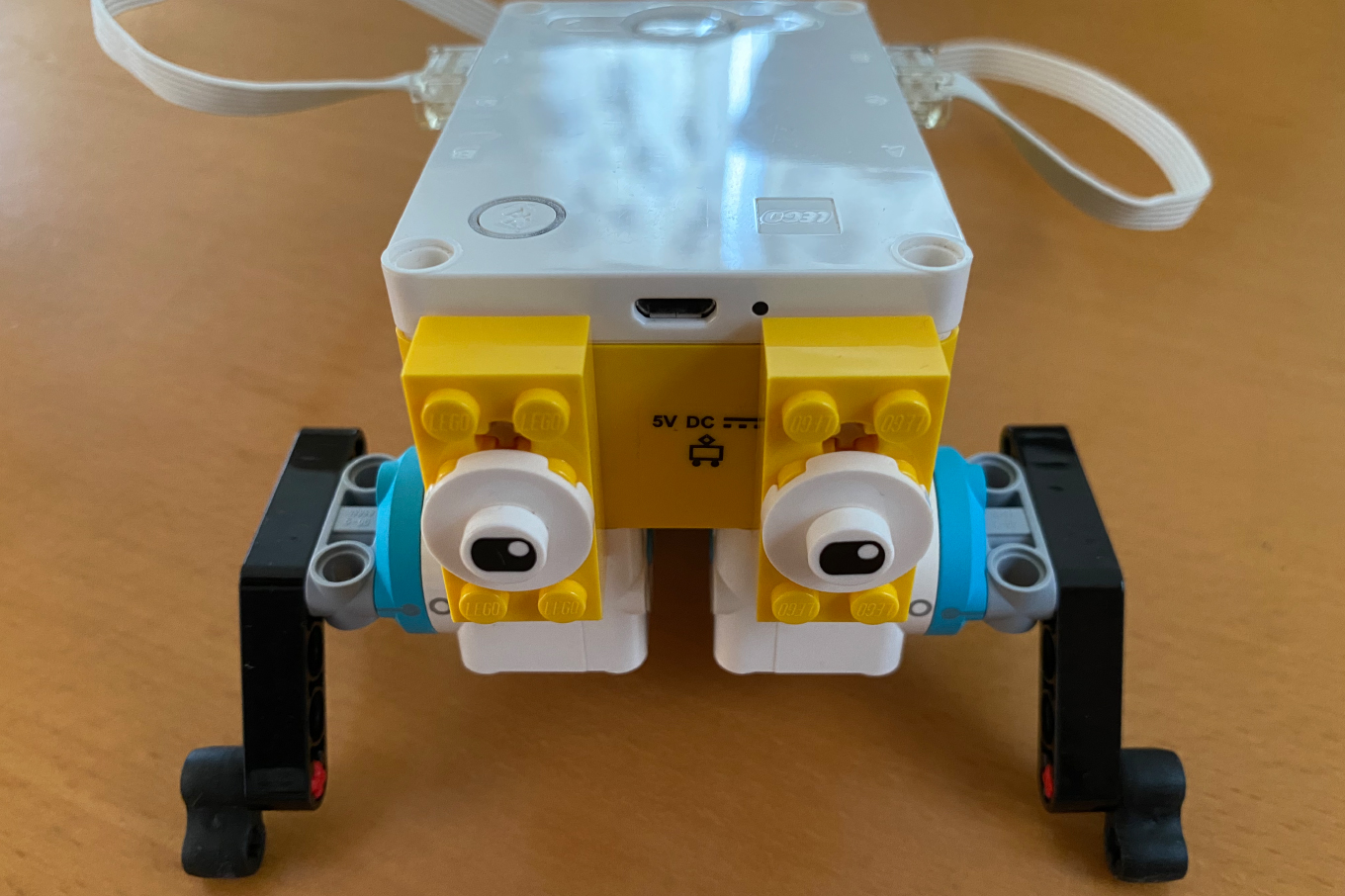
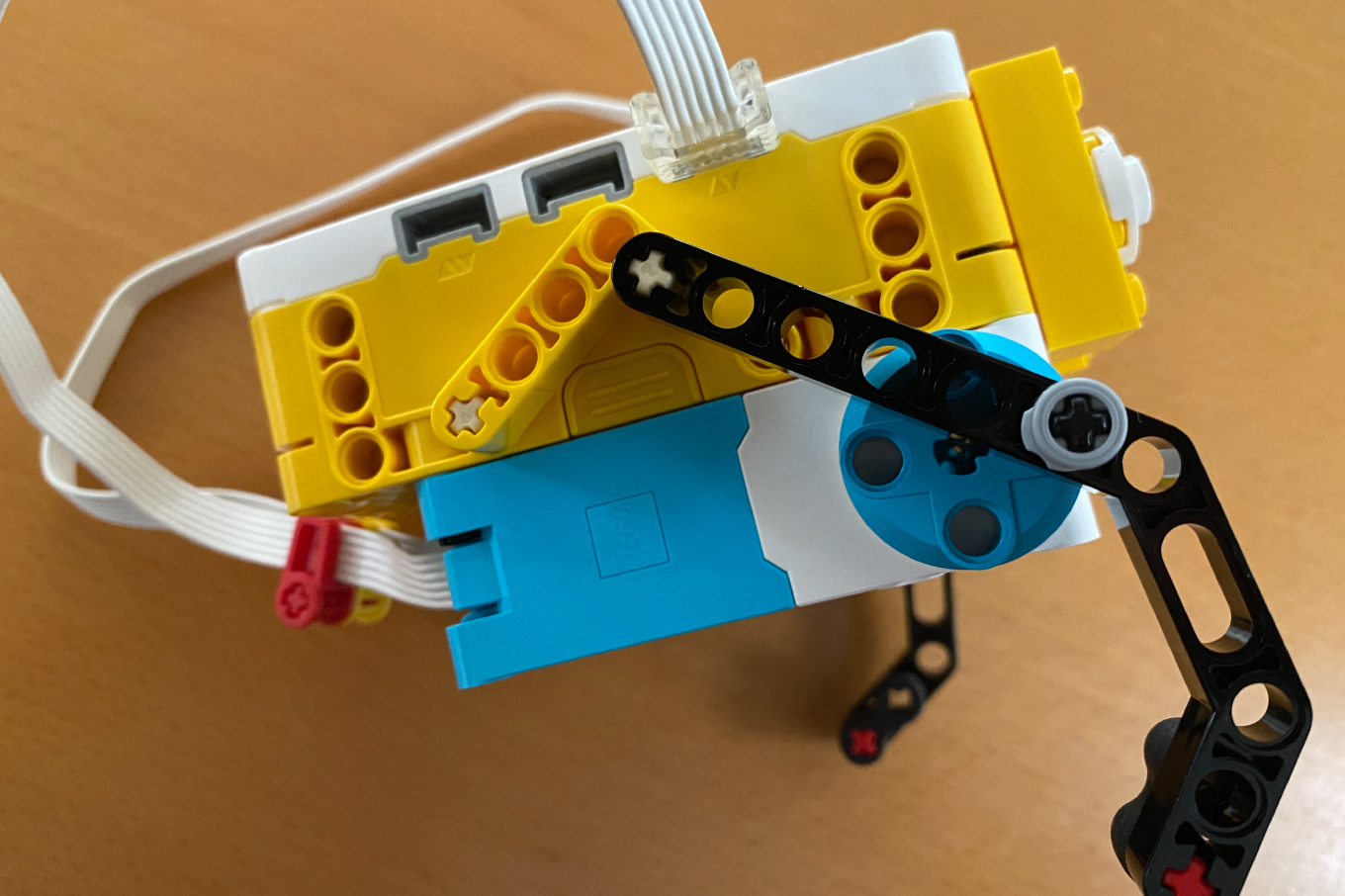
説明書通りに作るとこのような感じです
動かしてみましたが、バッタンバッタンうるさいです。本体や床へのダメージも気になるので、柔らかいところで動かした方がいいかも・・・
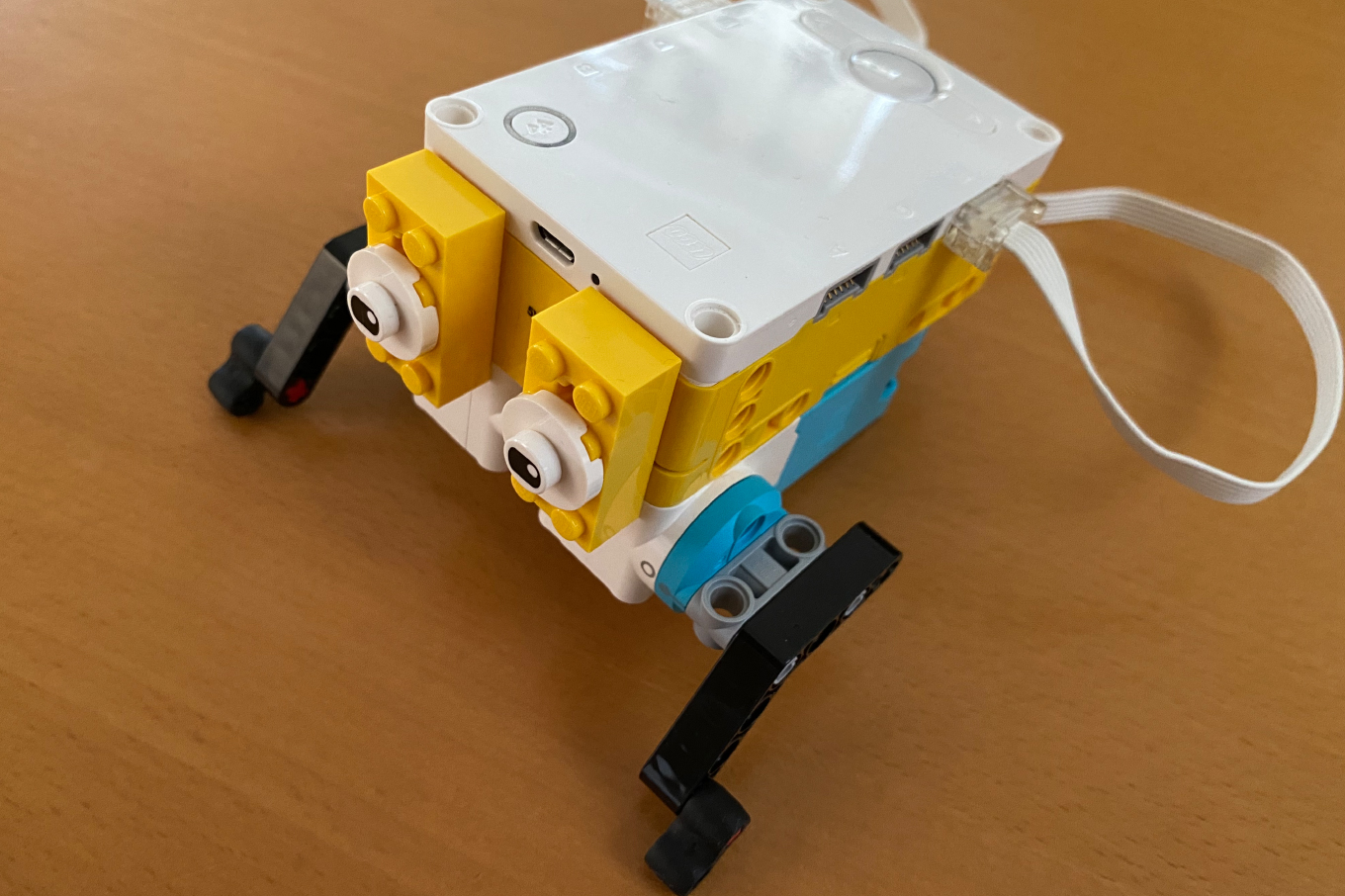
例として掲載されていた別の足に変更してみました
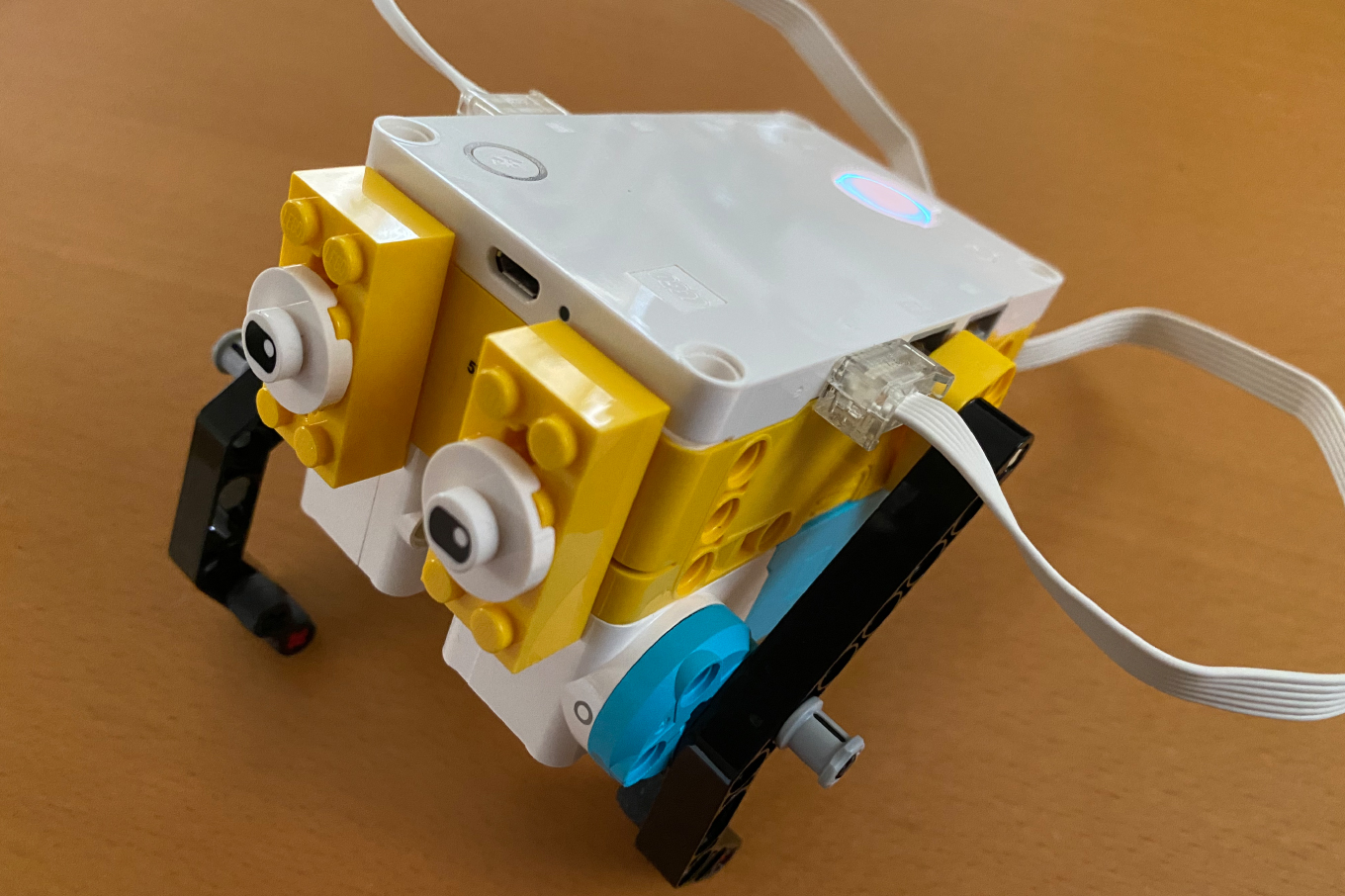
足と干渉してしまうので、モーターの接続をA・Bに変更しました
こちらはなかなかいい動きですね。歩いています
Pythonのプログラムはこちらです
from spike import PrimeHub, MotorPair
from spike.control import wait_for_seconds
hub = PrimeHub()
hop_motors = MotorPair('A', 'B') # AとBにモーターを接続します
hop_motors.set_default_speed(50)
# カウントダウン
hub.light_matrix.write('3')
wait_for_seconds(1)
hub.light_matrix.write('2')
wait_for_seconds(1)
hub.light_matrix.write('1')
wait_for_seconds(1)
# スタート
hop_motors.move(5, 'seconds')
# おしまい
hub.light_matrix.show_image('HEART')
[PR]

