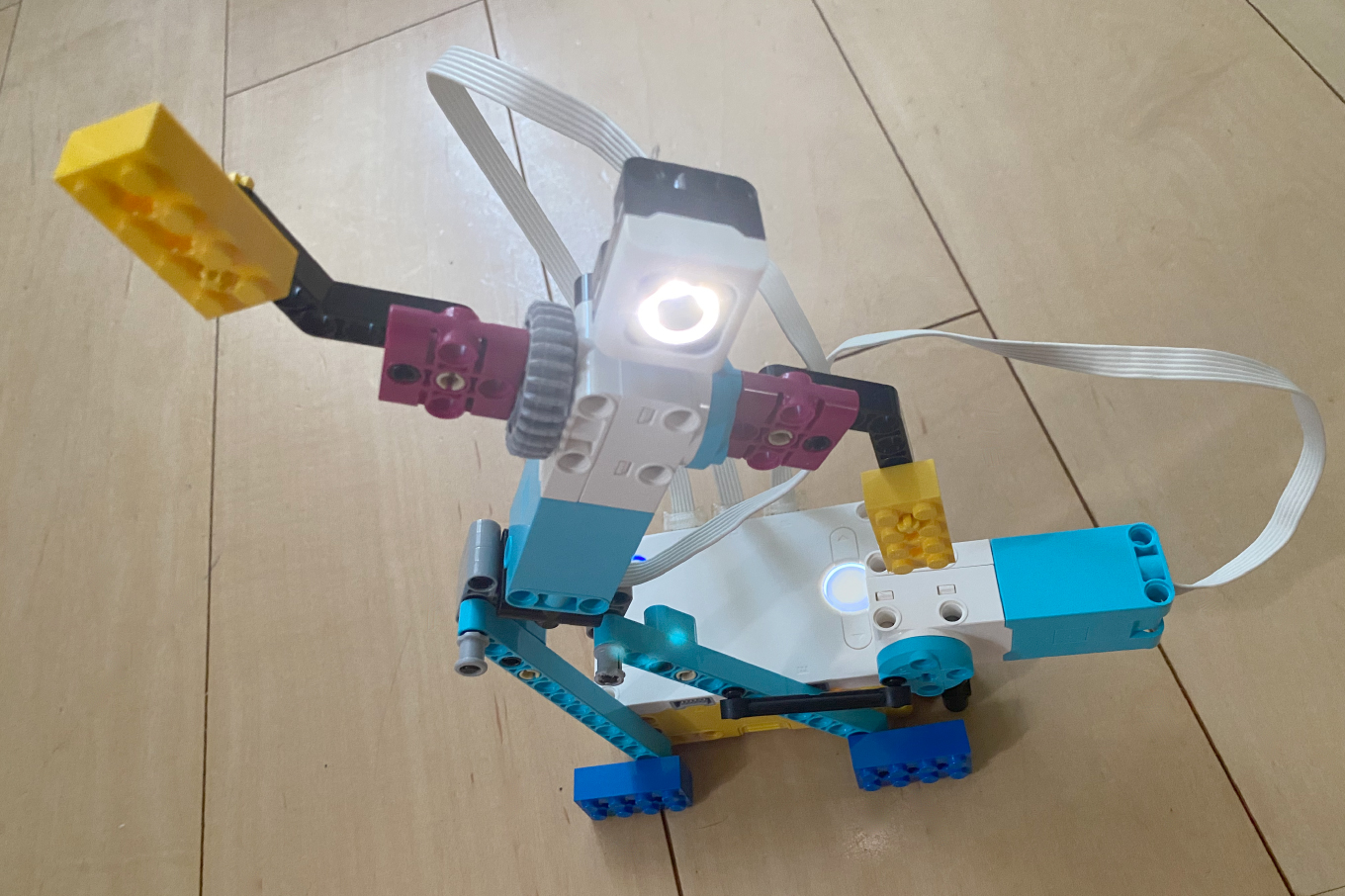
「ブレイクダンサー」を作りました。腕と脚を使ってダンスするロボットです
公式の教員向けのレッスンプランはこちらです
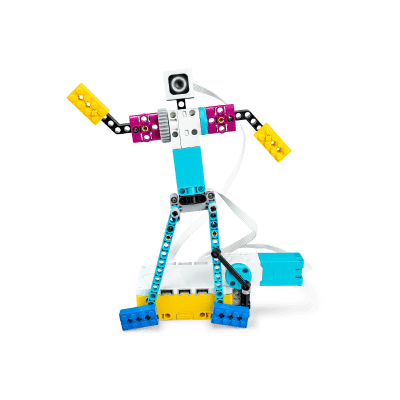
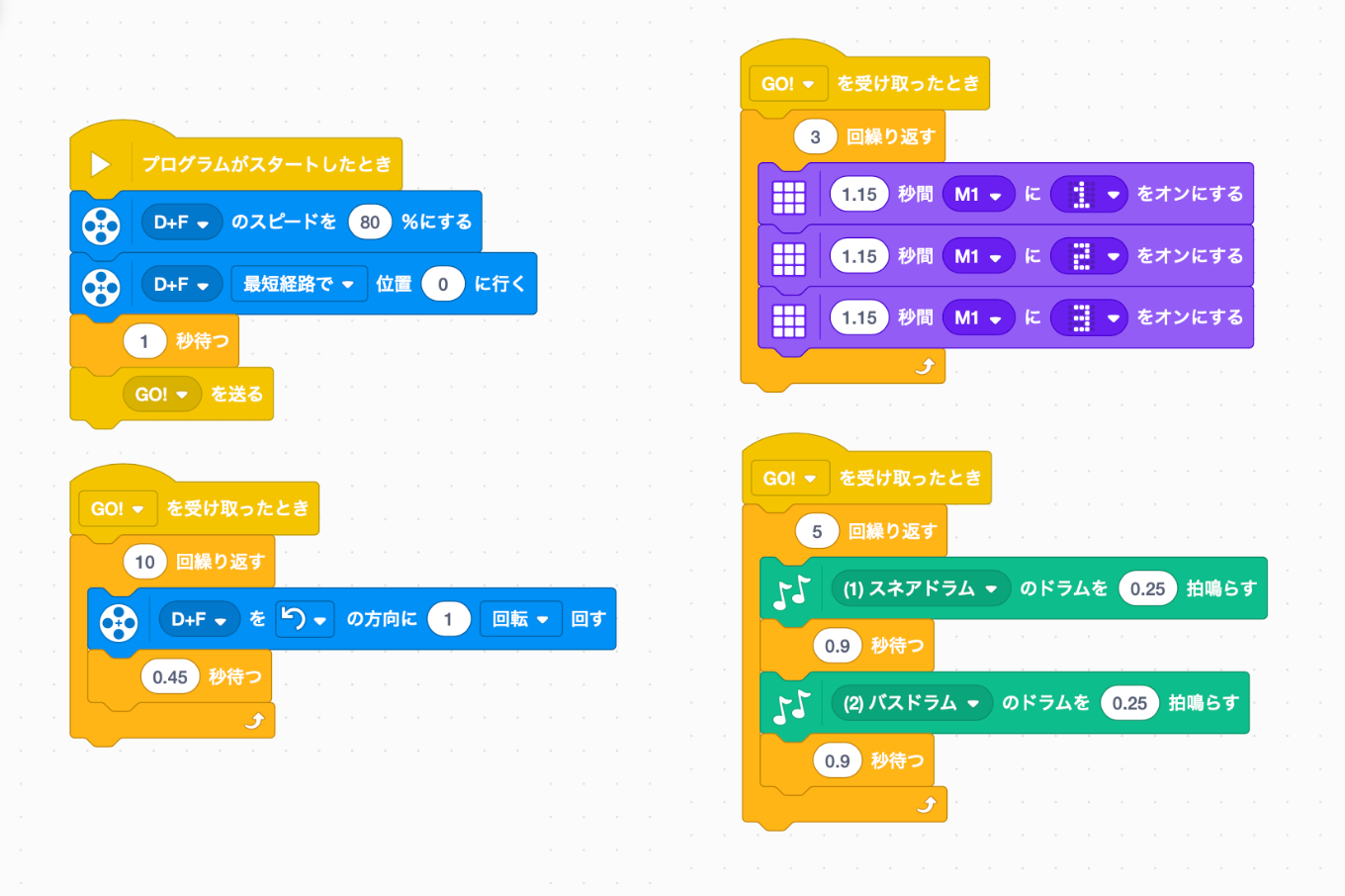
ダンシング
動きを「ブレイクダンサー」と同期させて、光と拍子でリズムを維持します。
education.lego.com
全ての動きのタイミングが合うようにプログラミングします
Pythonバージョン。一応、ダンスはしますが、ブロックプログラミングと同じ動作ではありません
from spike import PrimeHub, Motor, ColorSensor
from spike.control import wait_for_seconds
hub = PrimeHub()
leg_motor = Motor('F')
arm_motor = Motor('D')
color_sensor = ColorSensor('B')
leg_motor.set_default_speed(-80)
arm_motor.set_default_speed(-80)
leg_motor.run_to_position(0)
arm_motor.run_to_position(0)
wait_for_seconds(1)
for x in range(10):
hub.light_matrix.write("1")
leg_motor.start()
arm_motor.run_for_rotations(1)
leg_motor.stop()
wait_for_seconds(0.45)
hub.light_matrix.write("2")
leg_motor.start()
arm_motor.run_for_rotations(1)
leg_motor.stop()
wait_for_seconds(0.45)
hub.light_matrix.write("3")
leg_motor.start()
arm_motor.run_for_rotations(1)
leg_motor.stop()
wait_for_seconds(0.45)
[PR]