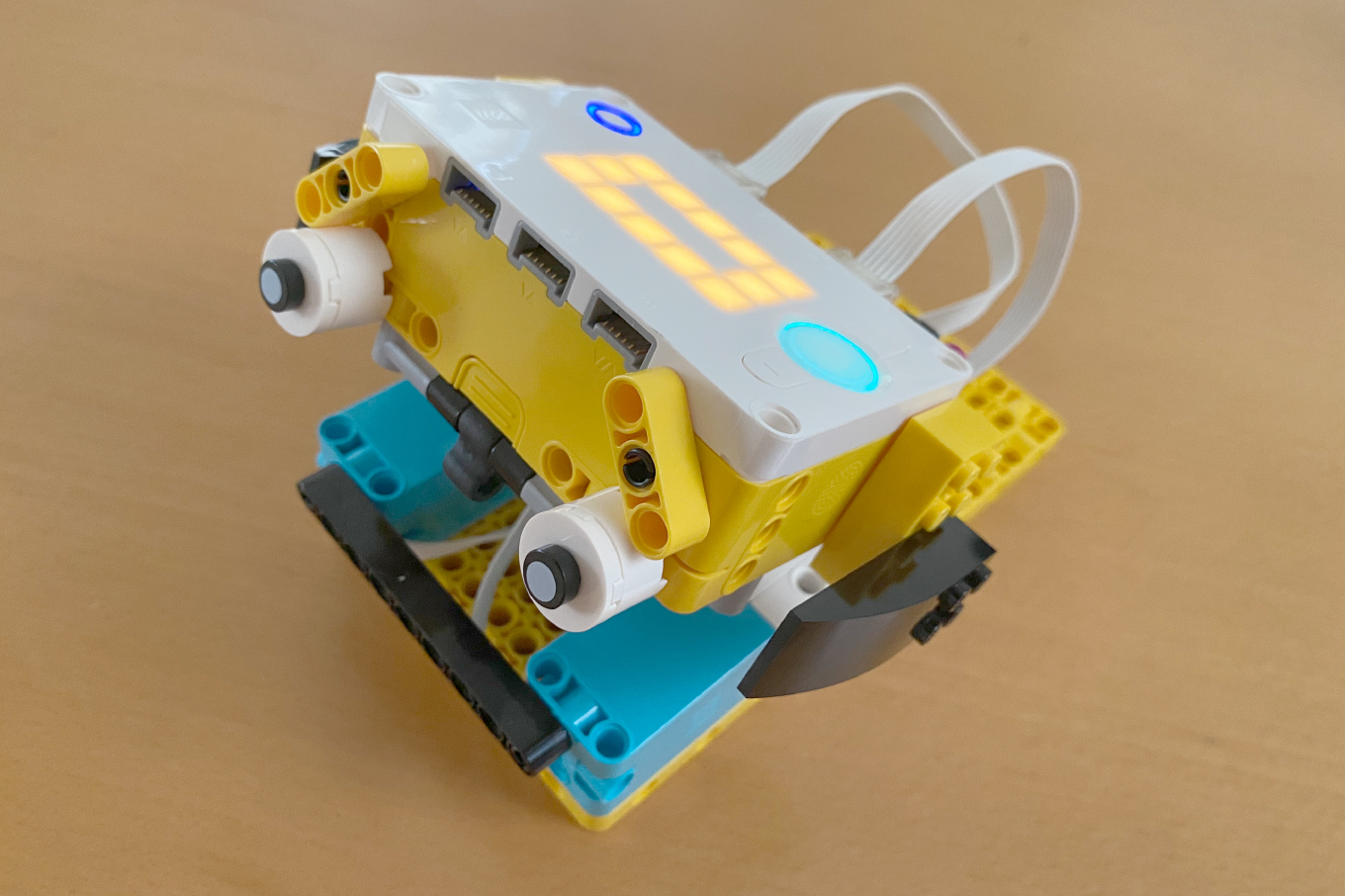
エクササイズトーレナーのレオを作りました。腹筋をするロボットです。プログラミングで設定した回数だけ腹筋します
公式の教員向けのレッスンプランはこちらです
エクササイズトレーナー
変数を使って、腹筋運動の回数と、トレーニング中の消費カロリーを計算しましょう。
education.lego.com
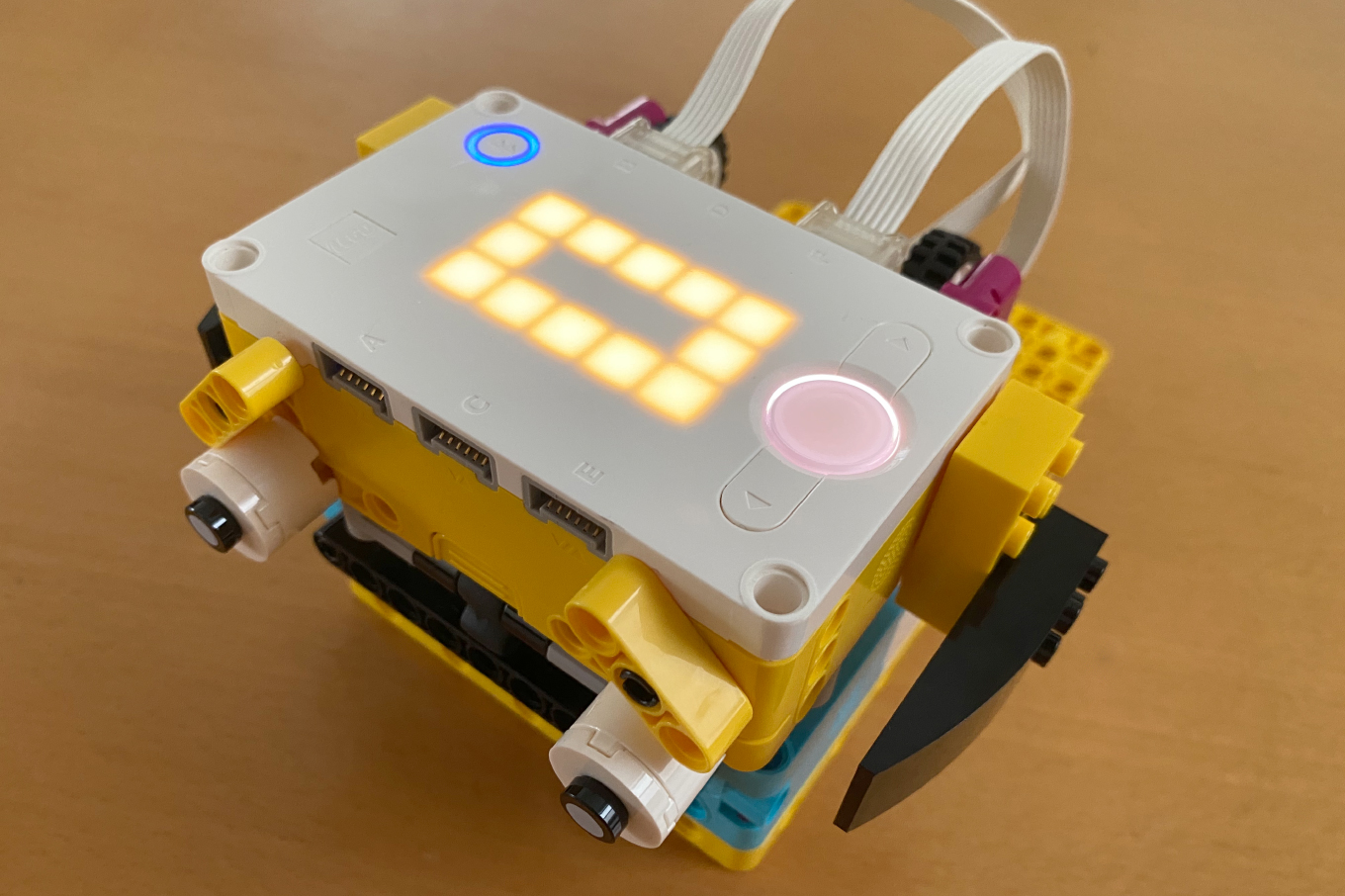
眉毛の角度を間違えて、ちょっと情けない顔になってしましました(^^;
本当はキリッとした顔です
腹筋した回数をライトマトリックスに表示します
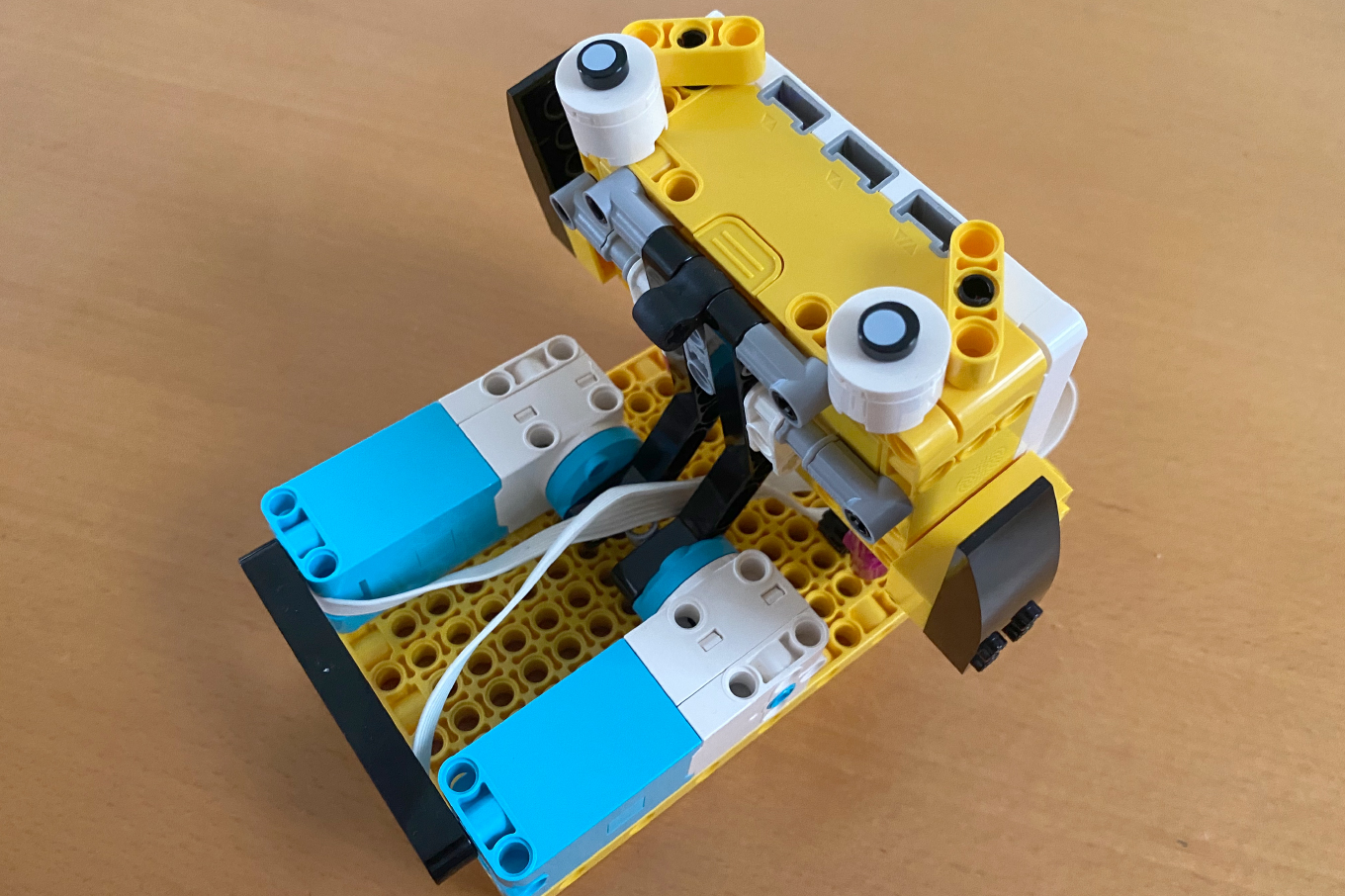
後ろから見たところ。ブロック同士がぶつかるところにはタイヤなどのゴム素材が使われています。よくできていますね
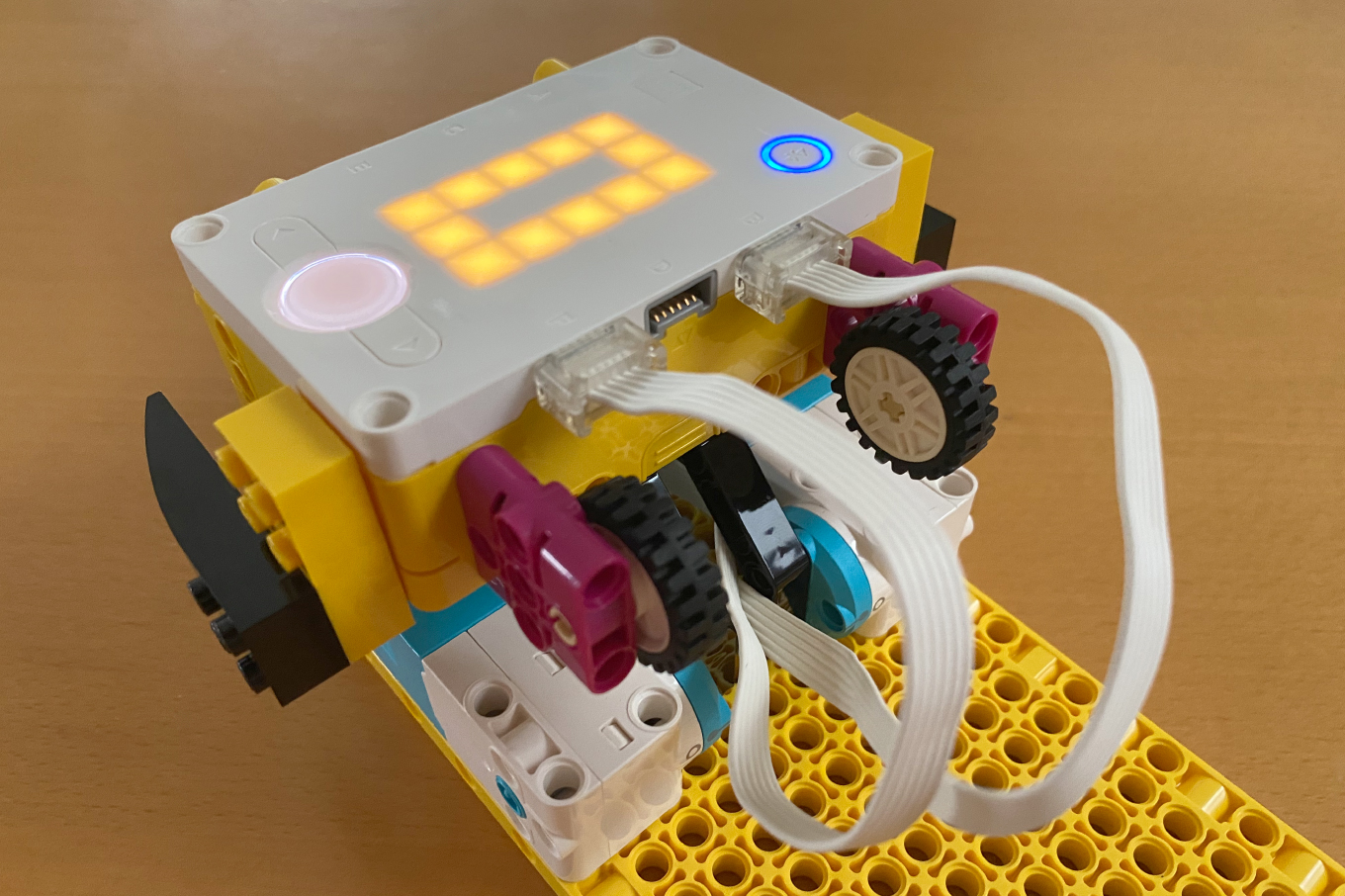
かなり激しい動きをします・・・
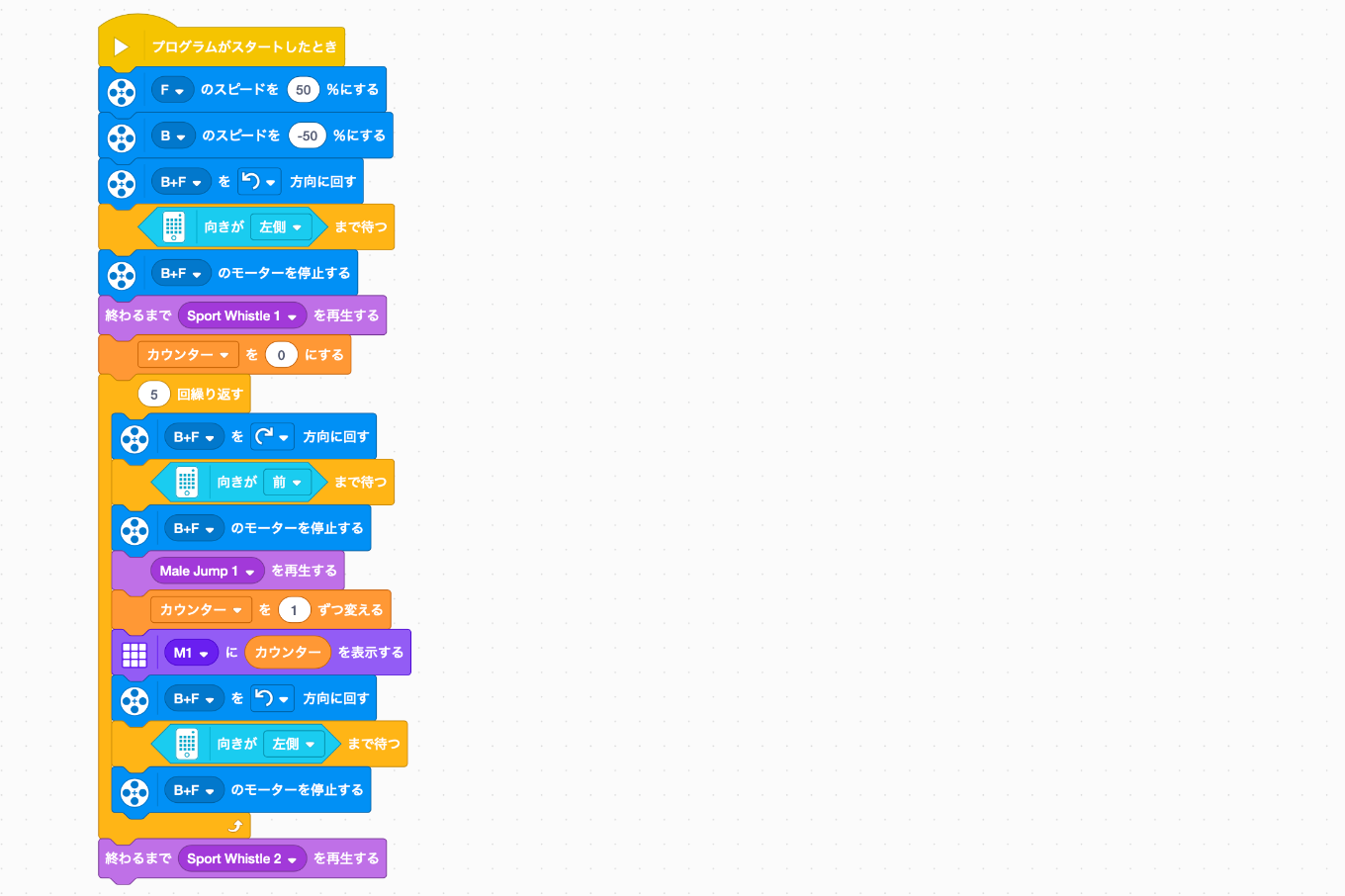
変数を使って腹筋回数をカウントします
こちらがPythonバージョンです
from spike import PrimeHub, App, Motor
from spike.control import wait_until, wait_for_seconds
from spike.operator import equal_to
hub = PrimeHub()
app = App()
left_leg_motor = Motor('B')
right_leg_motor = Motor('F')
left_leg_motor.set_default_speed(50)
right_leg_motor.set_default_speed(-50)
left_leg_motor.start()
right_leg_motor.start()
wait_until(hub.motion_sensor.get_orientation, equal_to, 'leftside')
right_leg_motor.stop()
left_leg_motor.stop()
app.play_sound('Sport Whistle 1')
for count in range(5):
left_leg_motor.set_default_speed(-50)
right_leg_motor.set_default_speed(50)
left_leg_motor.start()
right_leg_motor.start()
wait_until(hub.motion_sensor.get_orientation, equal_to, 'front')
right_leg_motor.stop()
left_leg_motor.stop()
app.start_sound('Male Jump 1')
hub.light_matrix.write(count + 1)
wait_for_seconds(0.5)
left_leg_motor.set_default_speed(50)
right_leg_motor.set_default_speed(-50)
left_leg_motor.start()
right_leg_motor.start()
wait_until(hub.motion_sensor.get_orientation, equal_to, 'leftside')
right_leg_motor.stop()
left_leg_motor.stop()
wait_for_seconds(0.5)
app.play_sound('Sport Whistle 2')
[PR]