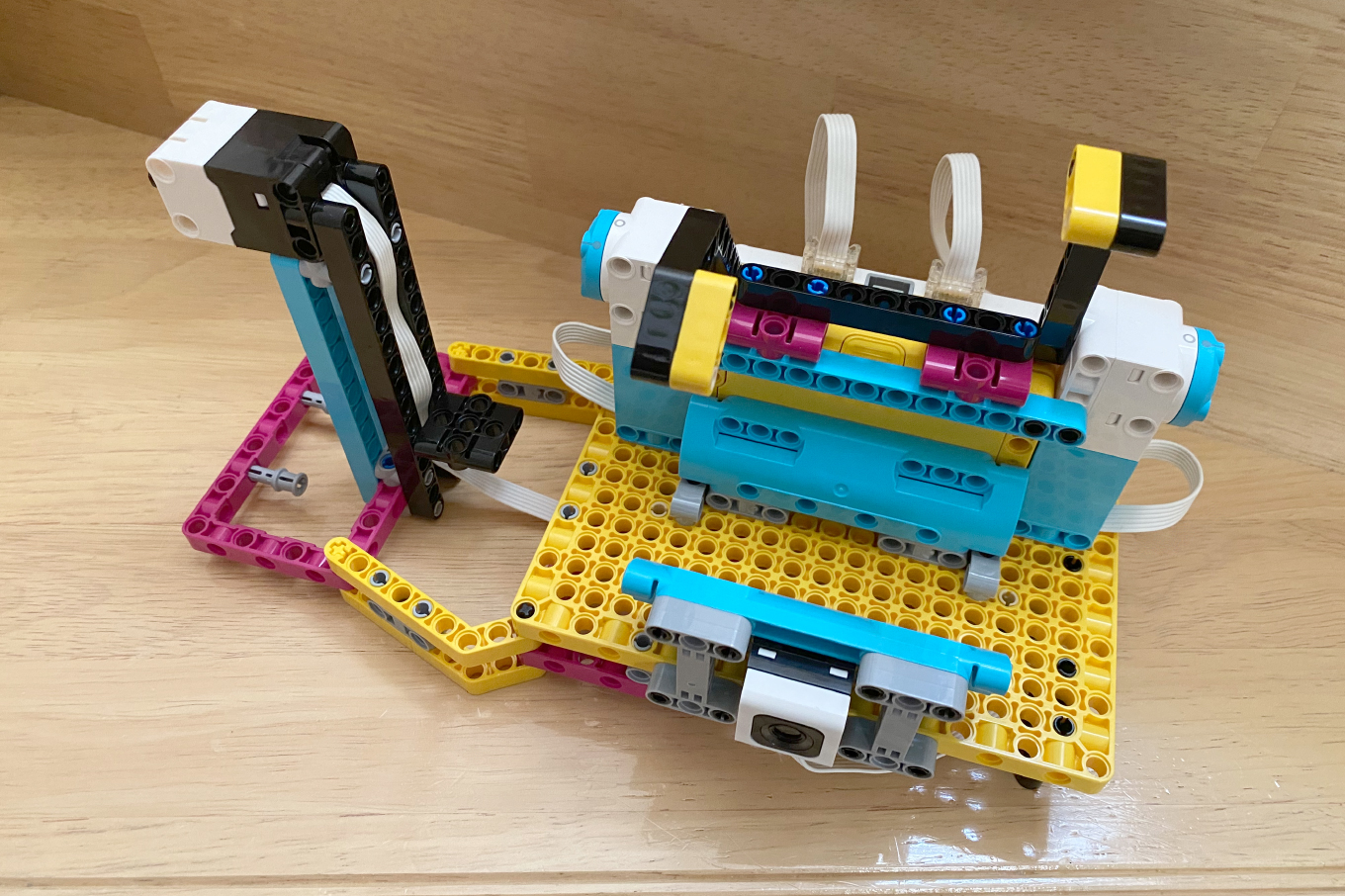
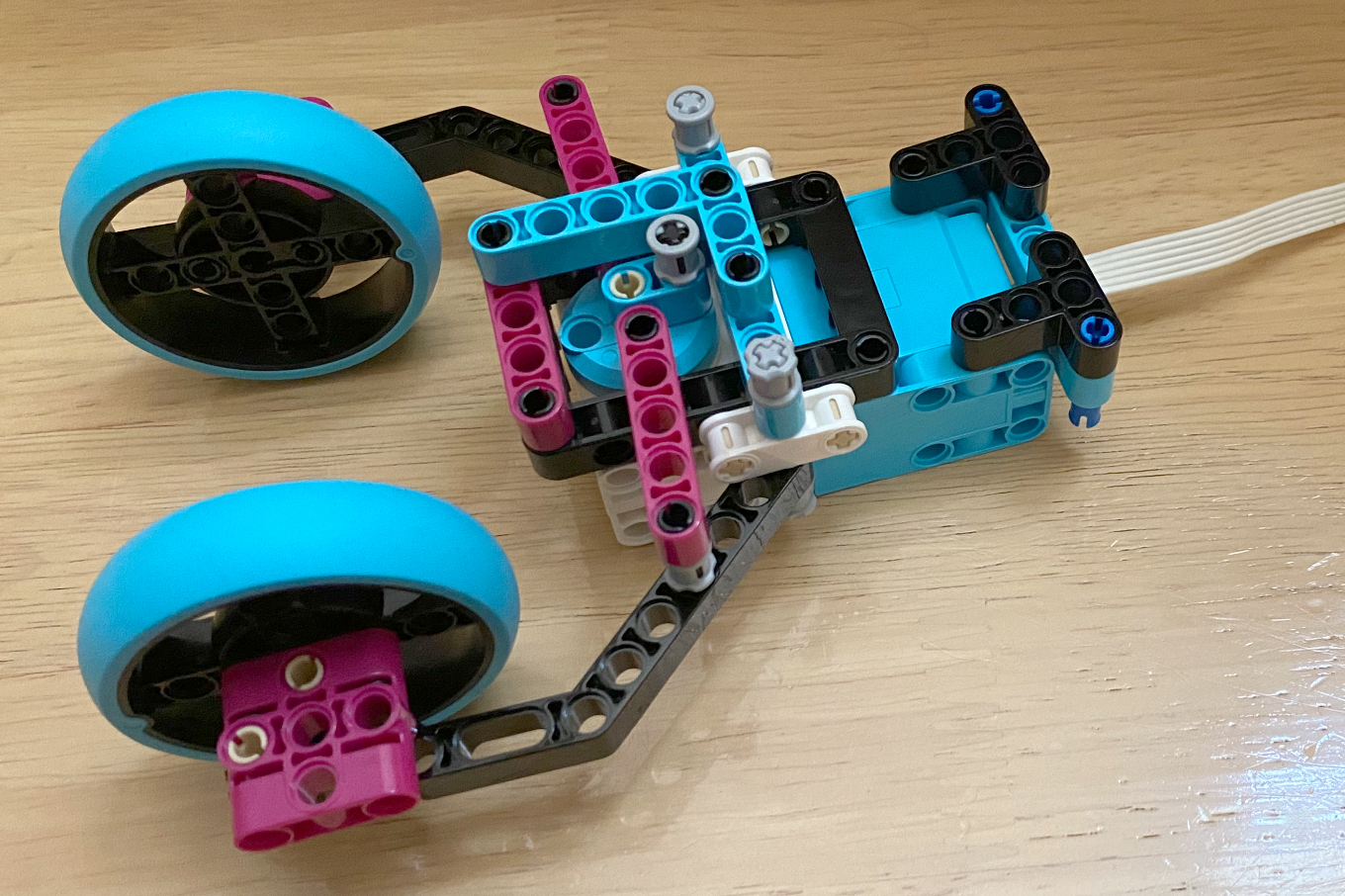
ロボットアームを作ってみました。作り方は専用アプリの中にはなく、公式サイトでPDFが公開されています
公式の教員向けレッスンプランはこちらです
世の中の役に立つ設計
デザインプロセスを使用して、プロテーゼ(人工器官)に関連した現実の問題を解決する。
education.lego.com
ただし、ロボットアームの先端部分の作り方は紹介されていないみたいなので、自分で工夫して作る必要があります。ちょっとハードル高めです
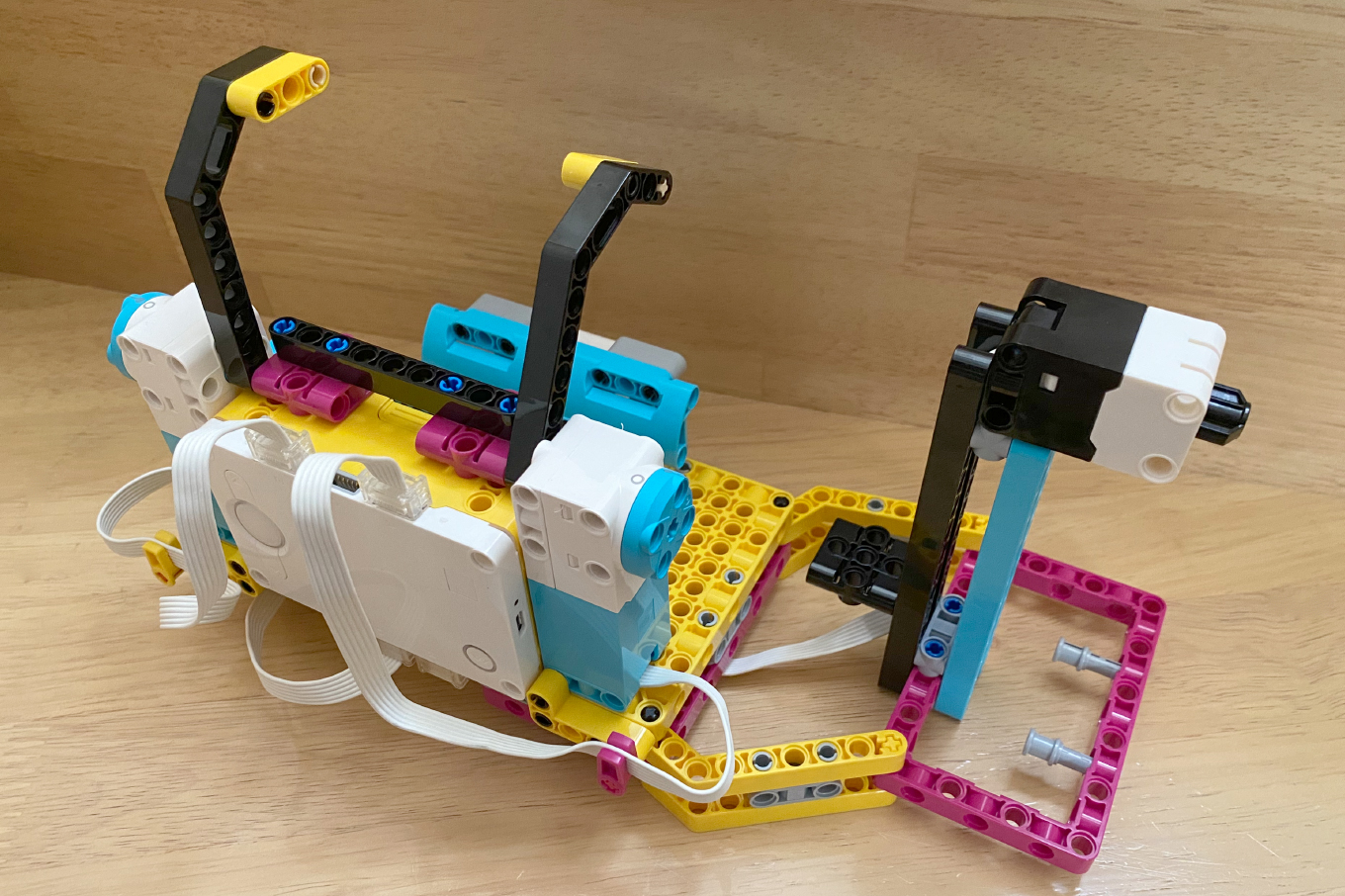
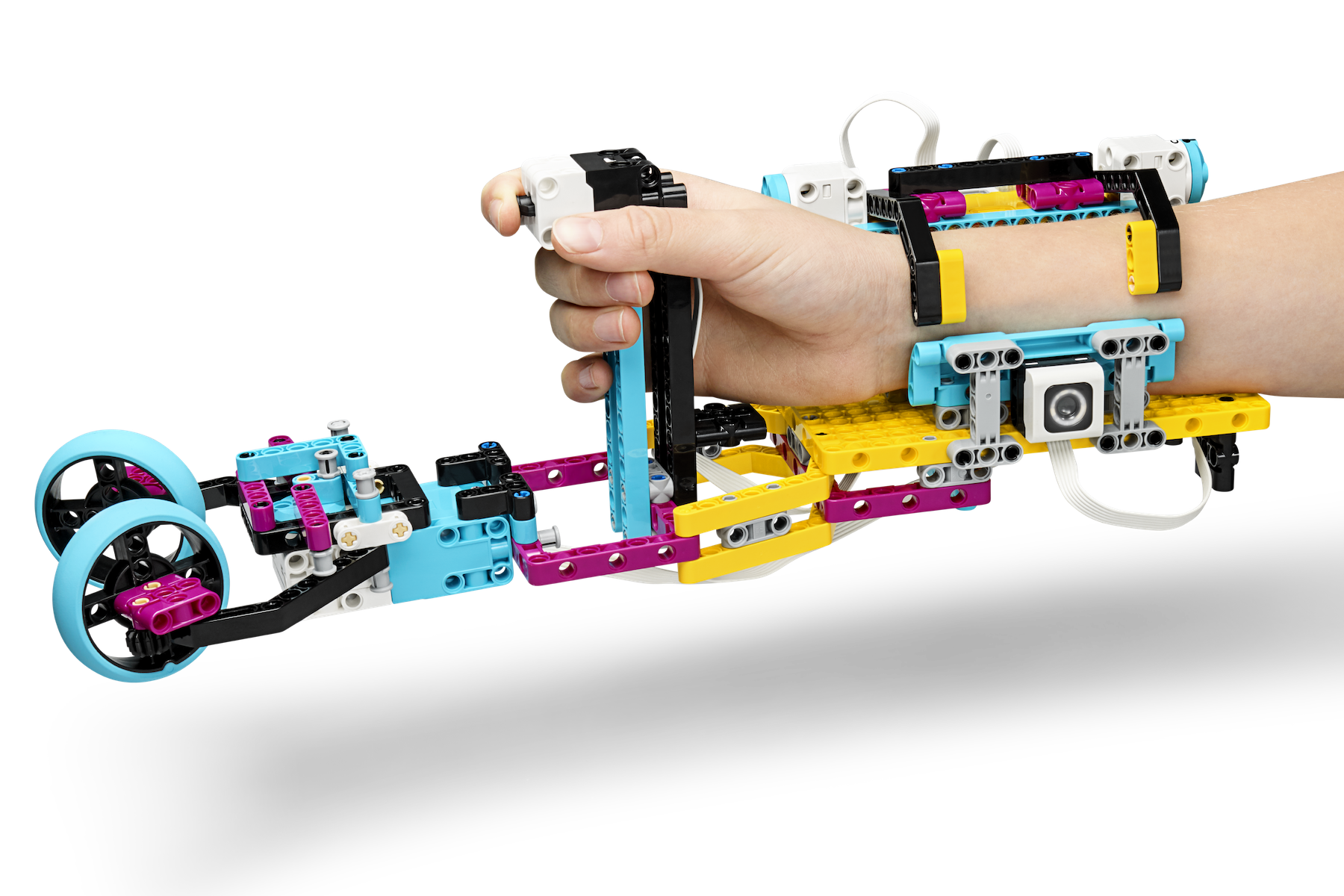
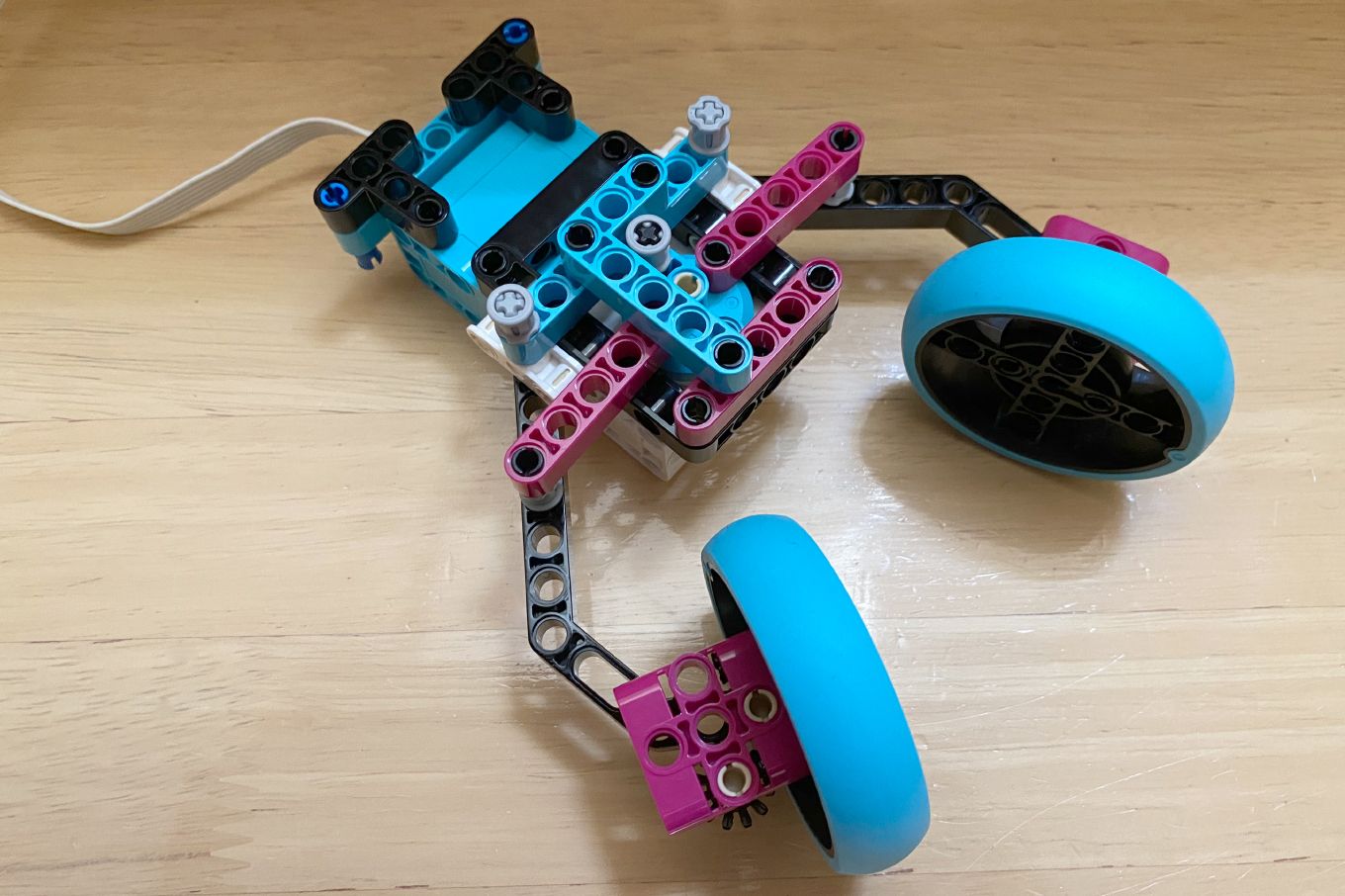
先端部分は公式サイトの写真を見ながら再現してみました
つなげてみました
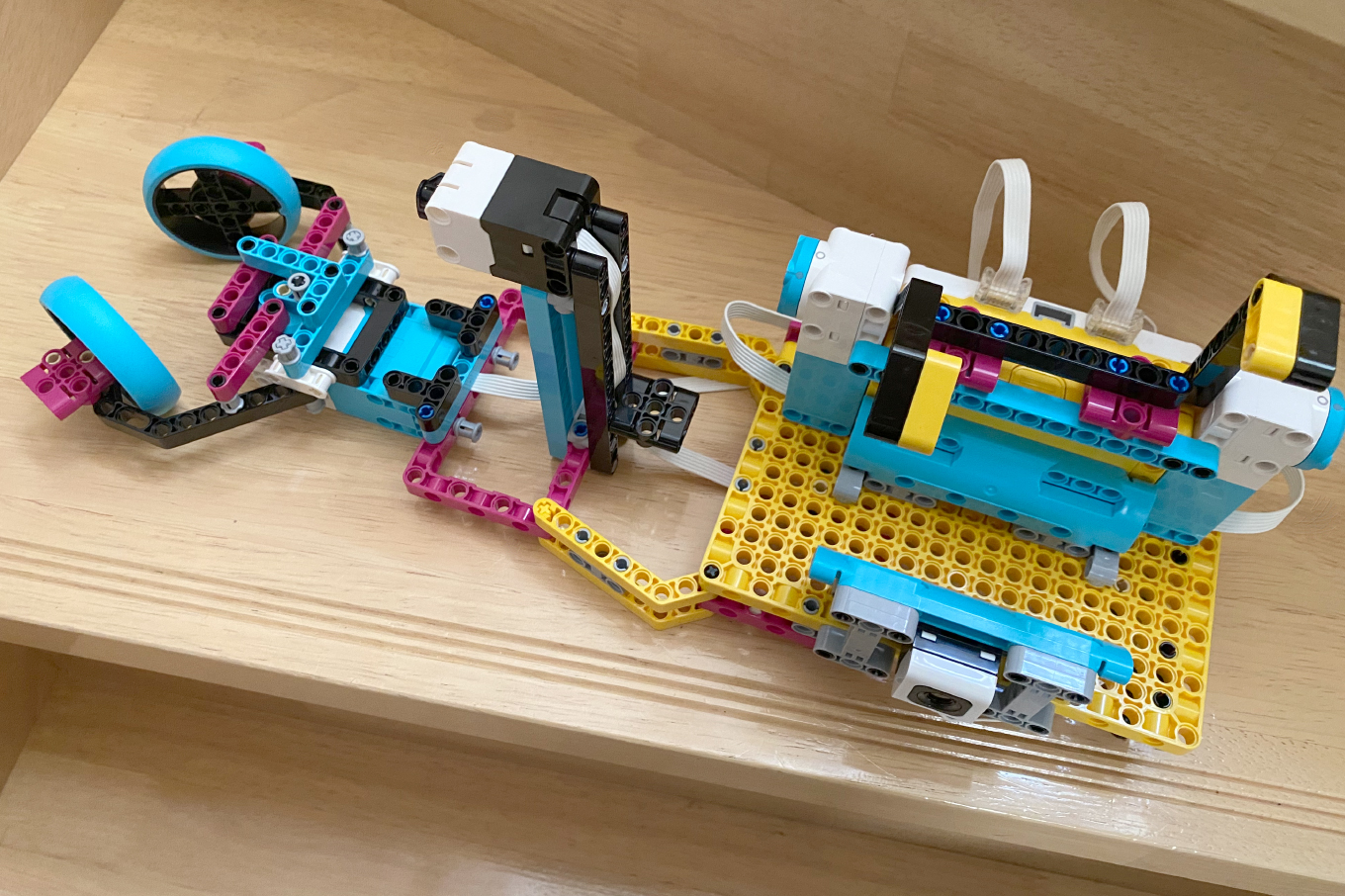
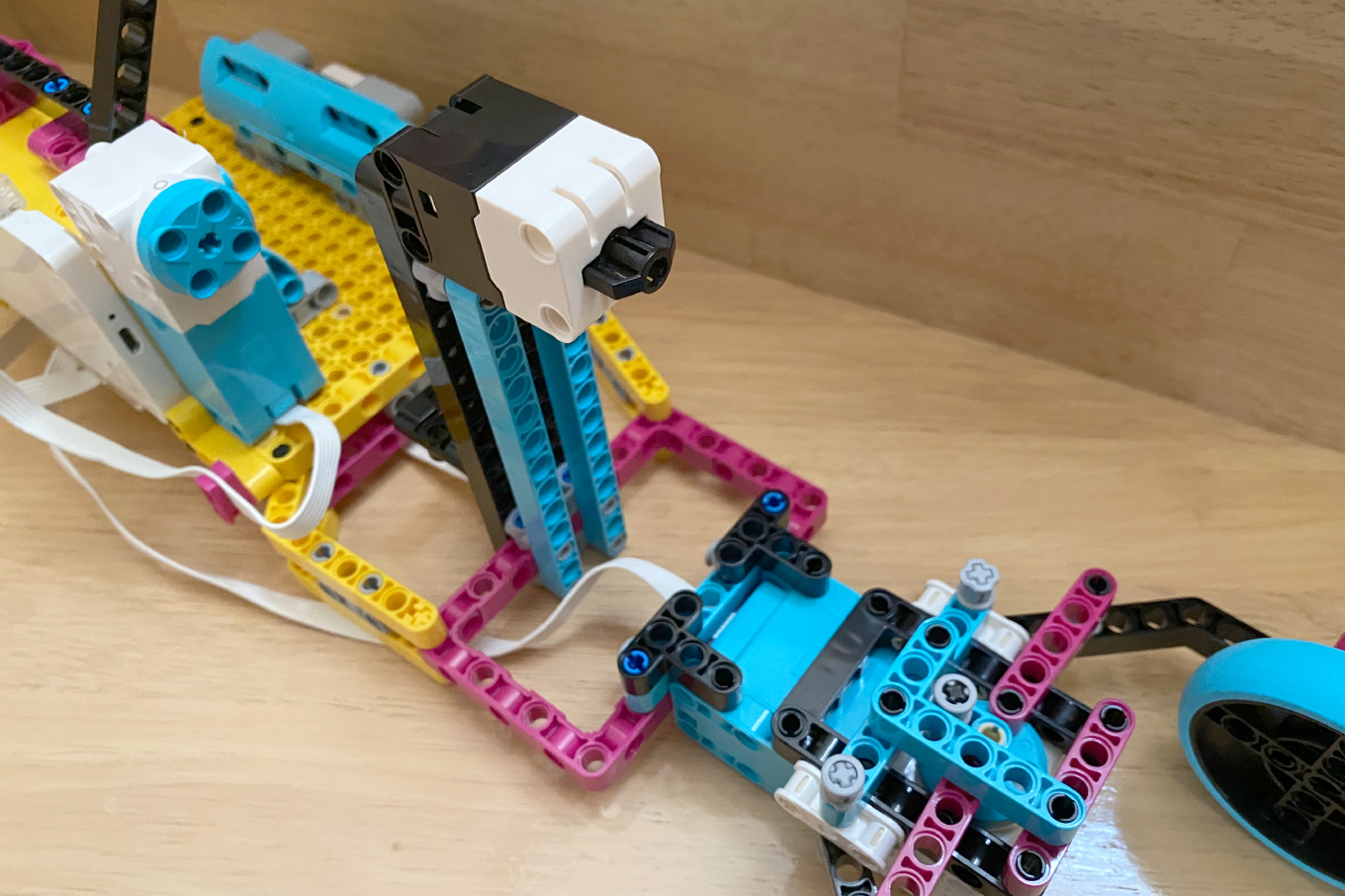
圧力センサーを押すと、モノをつかむことができます。実際の動きはこちら
最初の腕を掴んでロックする動きがカッコイイですね
こちらがワードブロックのプログラムです
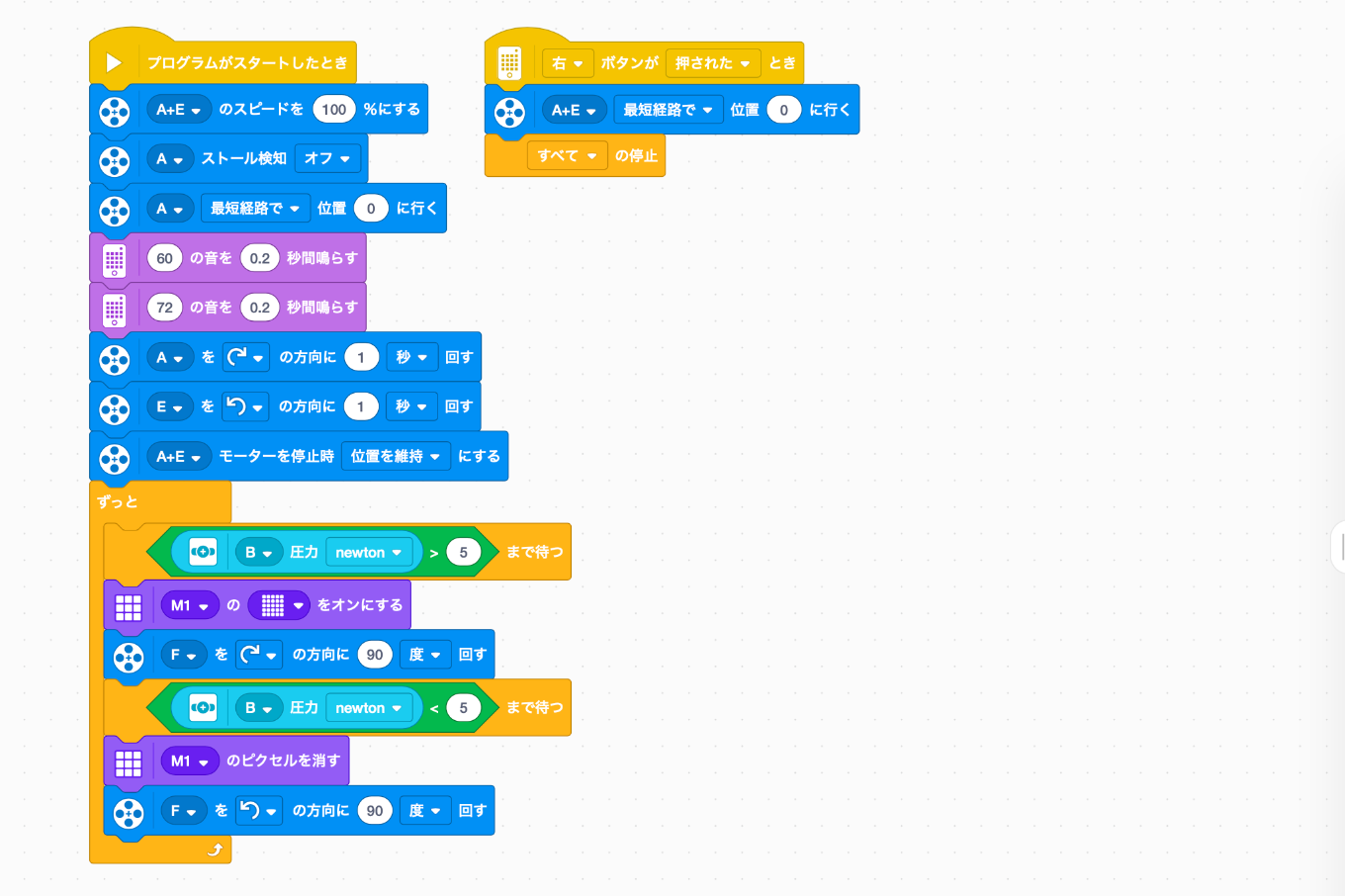
ただし、「モーターを停止時位置を維持する」ブロックがうまく動作しないみたいです。動かしているうちに、腕をつかむ部分の力が弱くなってきます(Pythonのプログラムだと正しく動作します)
こちらがPythonのプログラム。こっちのプログラムは腕をガッチリつかんでくれるので、こちらで動かすのがオススメです
from spike import PrimeHub, Motor, ForceSensor
from spike.control import wait_for_seconds
hub = PrimeHub()
motor_a = Motor('A')
motor_e = Motor('E')
moter_f = Motor('F')
force_sensor = ForceSensor('B')
motor_a.set_default_speed(100)
motor_e.set_default_speed(-100)
motor_a.set_stall_detection(False)
motor_e.set_stall_detection(False)
motor_a.set_stop_action('hold')
motor_e.set_stop_action('hold')
motor_a.run_to_position(0)
hub.speaker.beep(60)
hub.speaker.beep(72)
# 義手を人の腕につかまらせます。
motor_a.run_for_seconds(1)
motor_e.run_for_seconds(1)
while True:
if hub.right_button.was_pressed():
# 左ボタンを押すと、義手を腕から放します
motor_a.run_to_position(0)
motor_e.run_to_position(0)
break
if force_sensor.get_force_newton() > 5:
hub.light_matrix.show_image('SQUARE')
moter_f.run_to_position(90)
else:
hub.light_matrix.off()
moter_f.run_to_position(0)
wait_for_seconds(0.01)
[PR]