第25号です

25号の中身は?
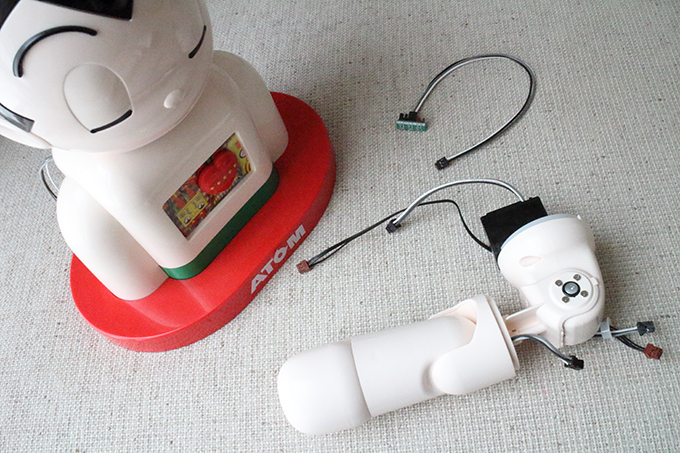
- 左上腕カバー(C)
- 左上腕カバー(D)
- 3連ハブ基板
- 2x4mmビスx3
マガジンの内容の抜粋です
- 週間ロボットニュース
-ロボットが読経!? IT葬儀に「ロボット導師」登場 - 手塚治虫グッズコレクション
-第1回 デザイナーズ・コラボ - ATOMにできること
-メールを読んでもらおう
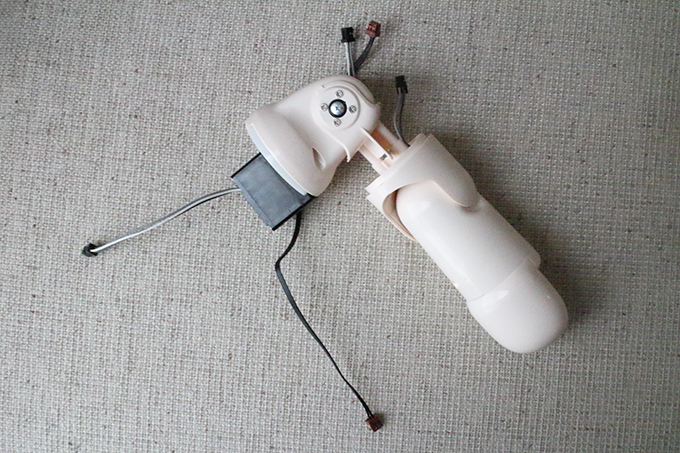
今回のアトム
今週号のパーツ

今回は、チェックスタンドとテスト基板用延長ハーネスと左腕も使います
左肩用サーボモーター(ID7)の動作確認
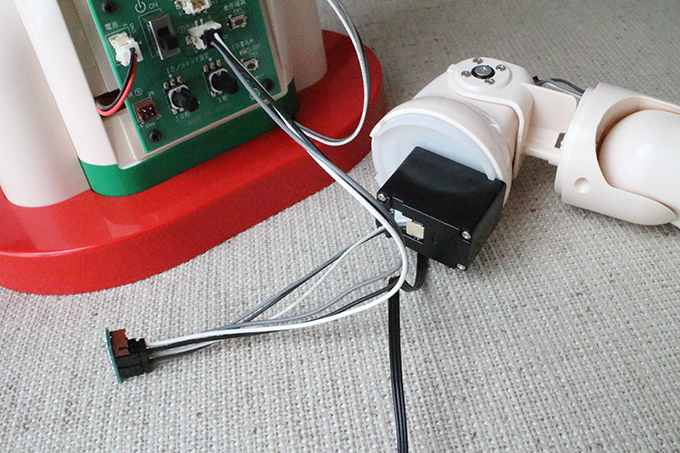
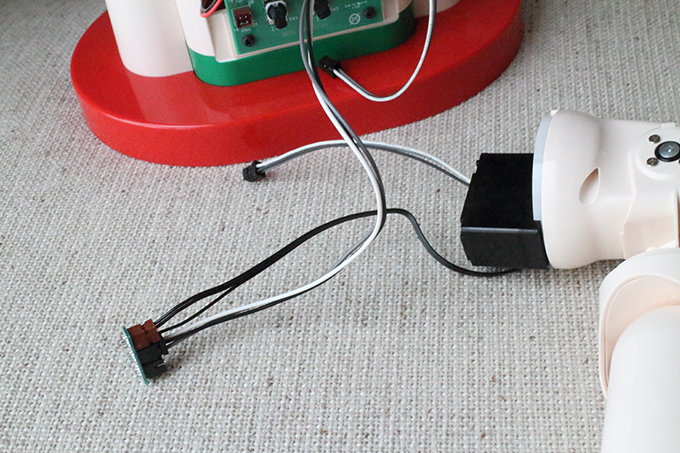
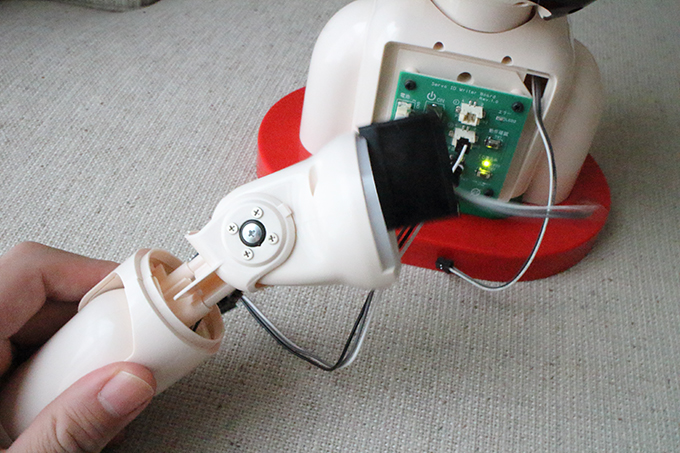
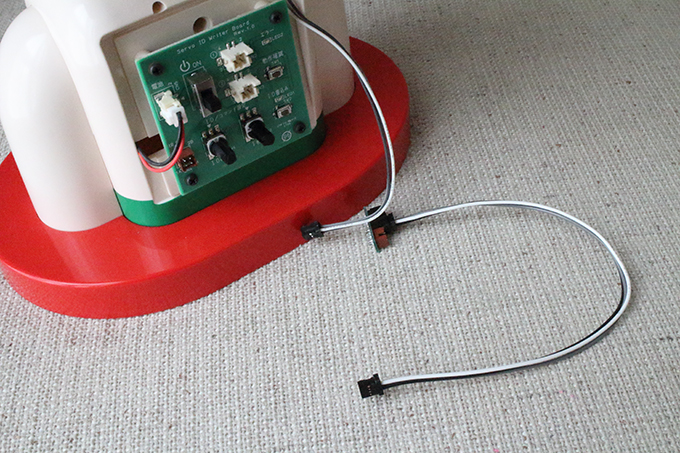
チェックスタンドにテスト基板用延長ハーネスを取り付けます
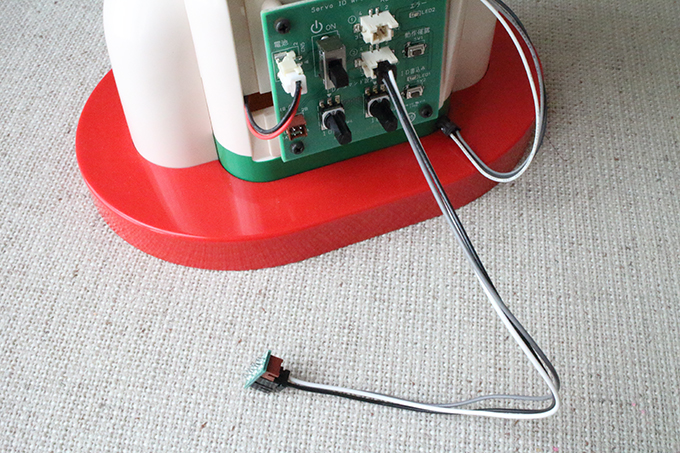
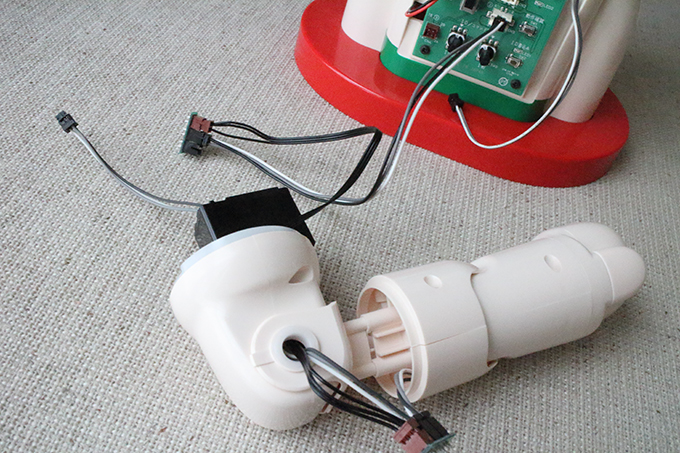
サーボモーター(ID7)のハーネスを3連ハブ基板に取り付けます
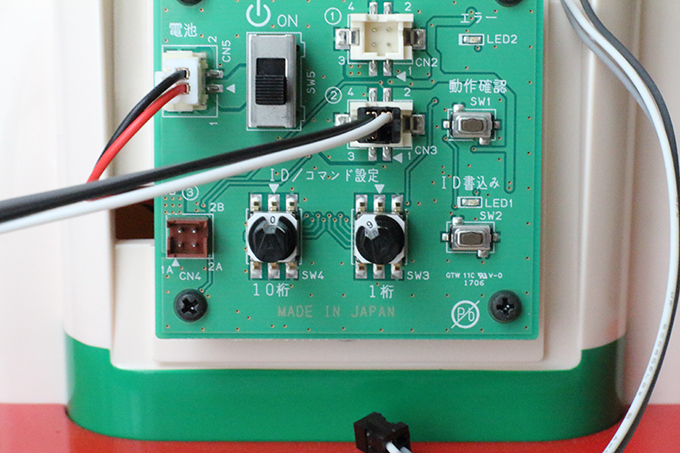
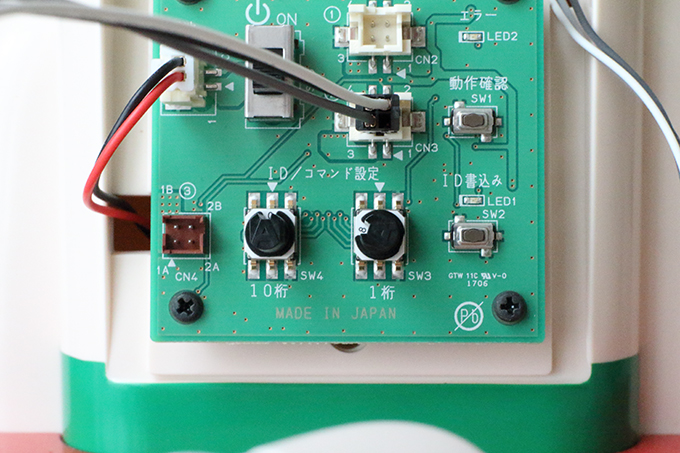
ロータリースイッチの10桁を「0」、1桁を「7」に合わせます
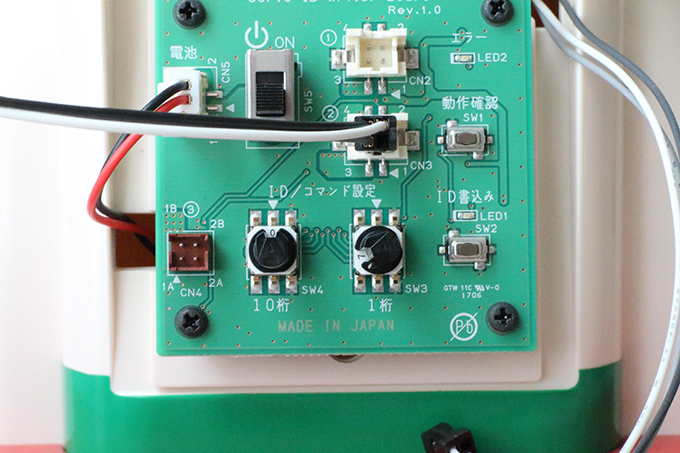
ロータリースイッチの電源をONにして、動作確認ボタンを押します
動作確認後、この位置に戻ると動作OKです
ID7の確認完了です
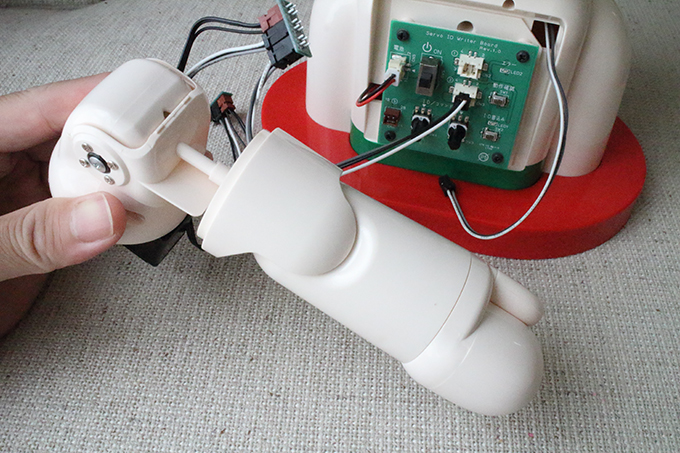
中継ハーネス経由の動作確認
3連ハブを・・・

取り付けます
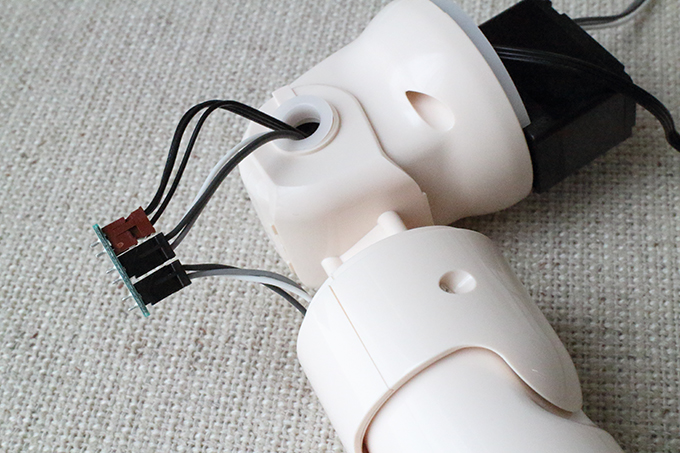
中継ハーネスをテスト基板用延長ハーネスに差し込みます
ロータリースイッチの10桁を「0」、1桁を「9」に合わせます
動作確認します
ひじの動作角度が問題なければOKです
そのまま、引き続きID8の動作確認をします。ロータリースイッチの10桁を「0」、1桁を「8」に合わせます
動作確認します
上腕の動作角度が問題なければOKです
テスト基板用延長ハーネスを取り外します
左上腕カバーの取り付け
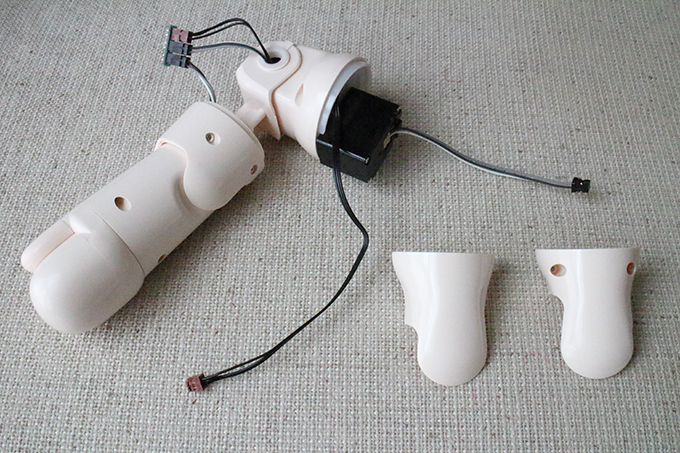
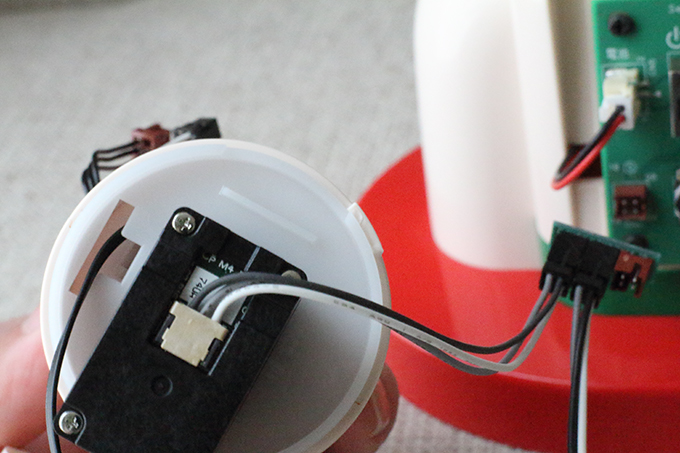
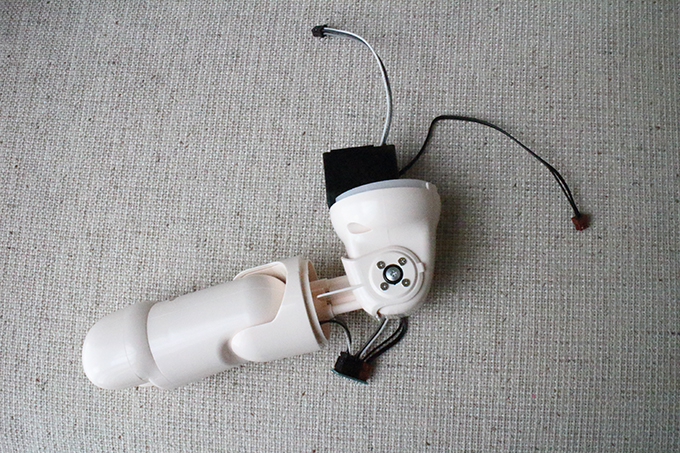
3連ハブ基板を左腕カバーの中に入れます

左腕カバー(D)を取り付けます

左腕カバー(C)を取り付けます

ビスで止めます

左腕の完成です

これで左右の腕が完成しました!60号以降まで保存しておきます

こちらが作り方の動画です