「掴み取り装置」を作ってみました
公式の教員向けレッスンプランはこちらです
2つのテストモデル
2つのグラバー(つかむためもの)の設計の効率性をテストして、最良の設計を決めましょう。
education.lego.com
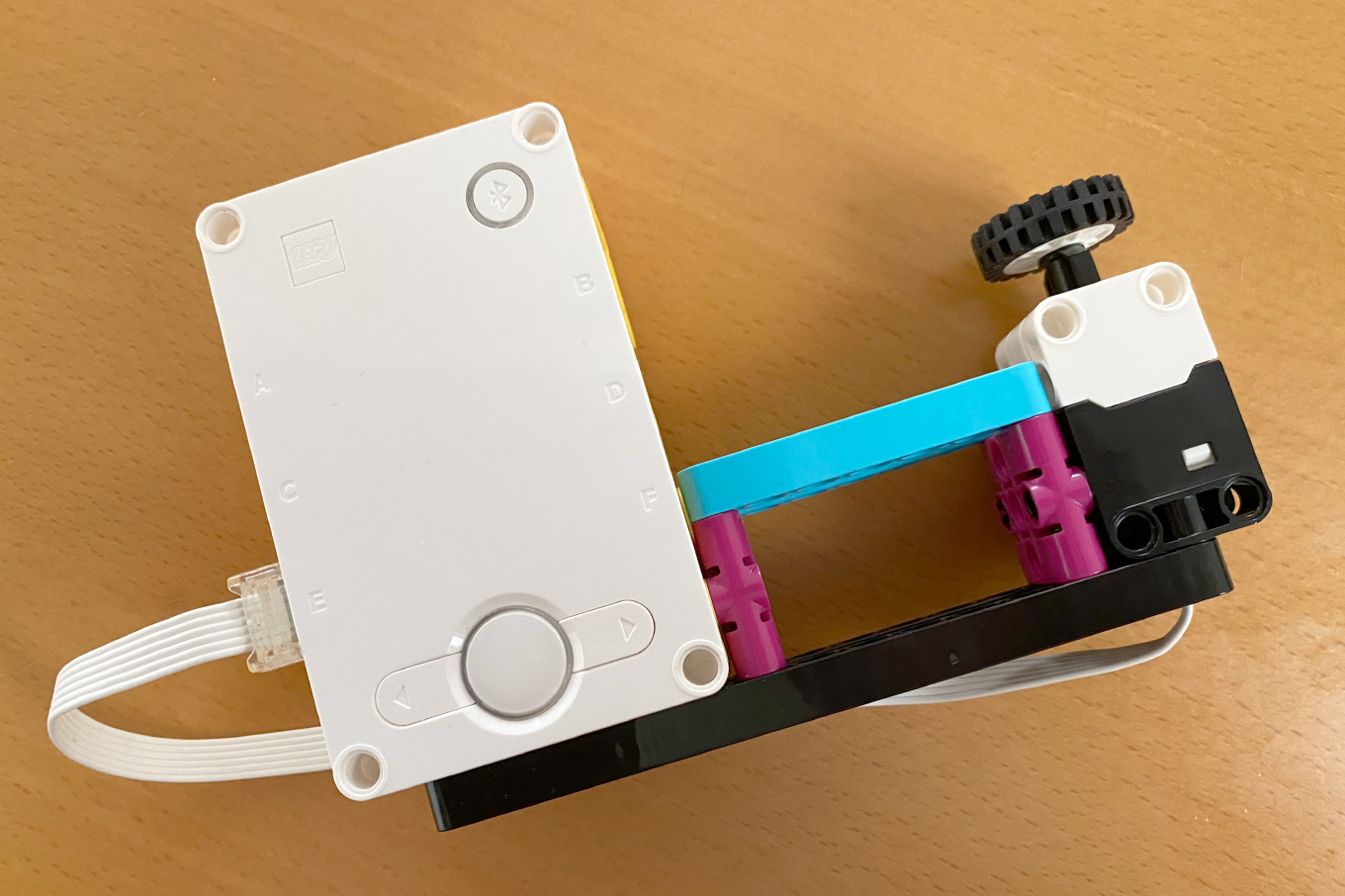
3つのパーツに分かれています。これが本体です。タイヤがついている白黒のパーツがフォースセンサーです
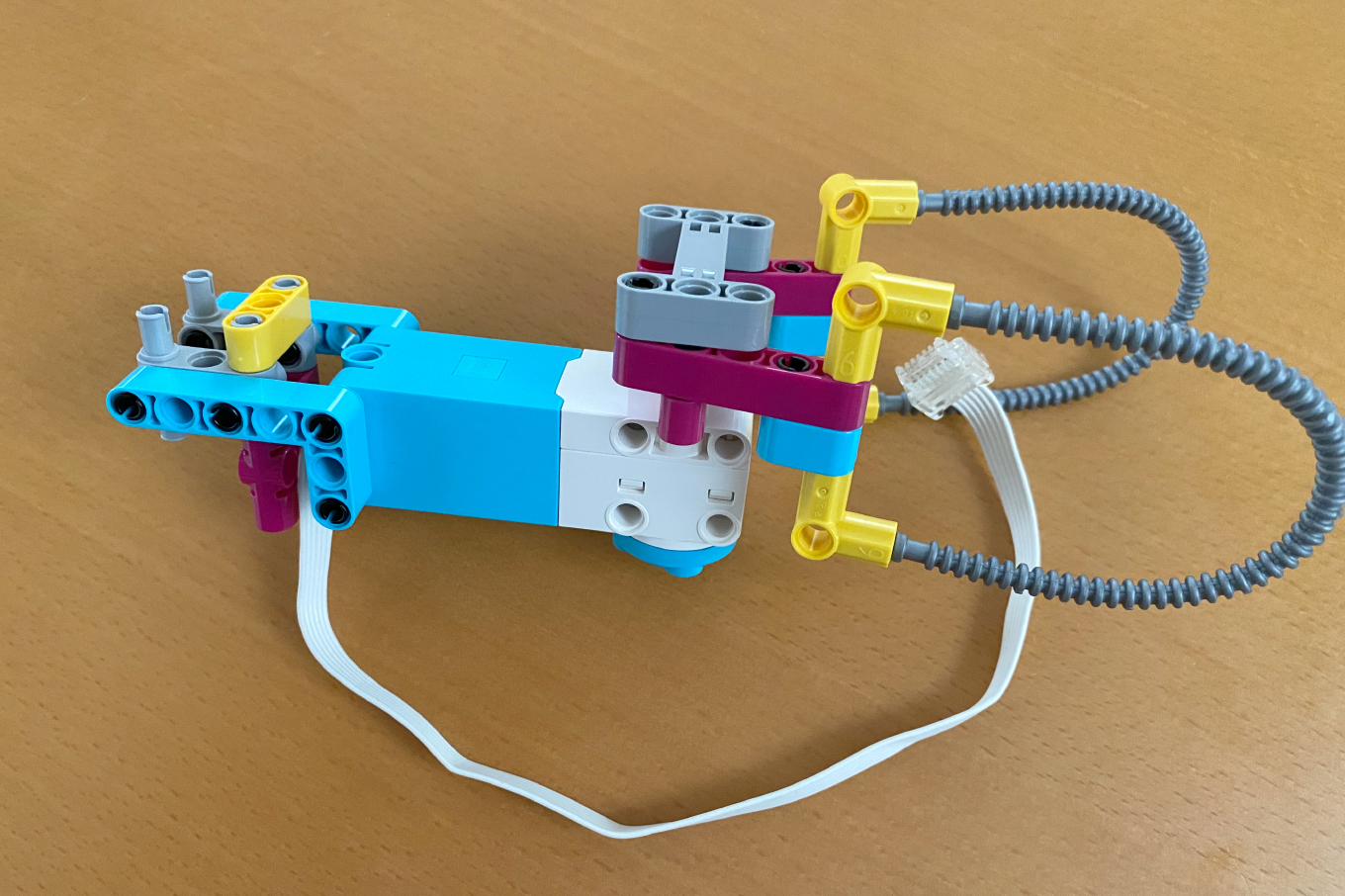
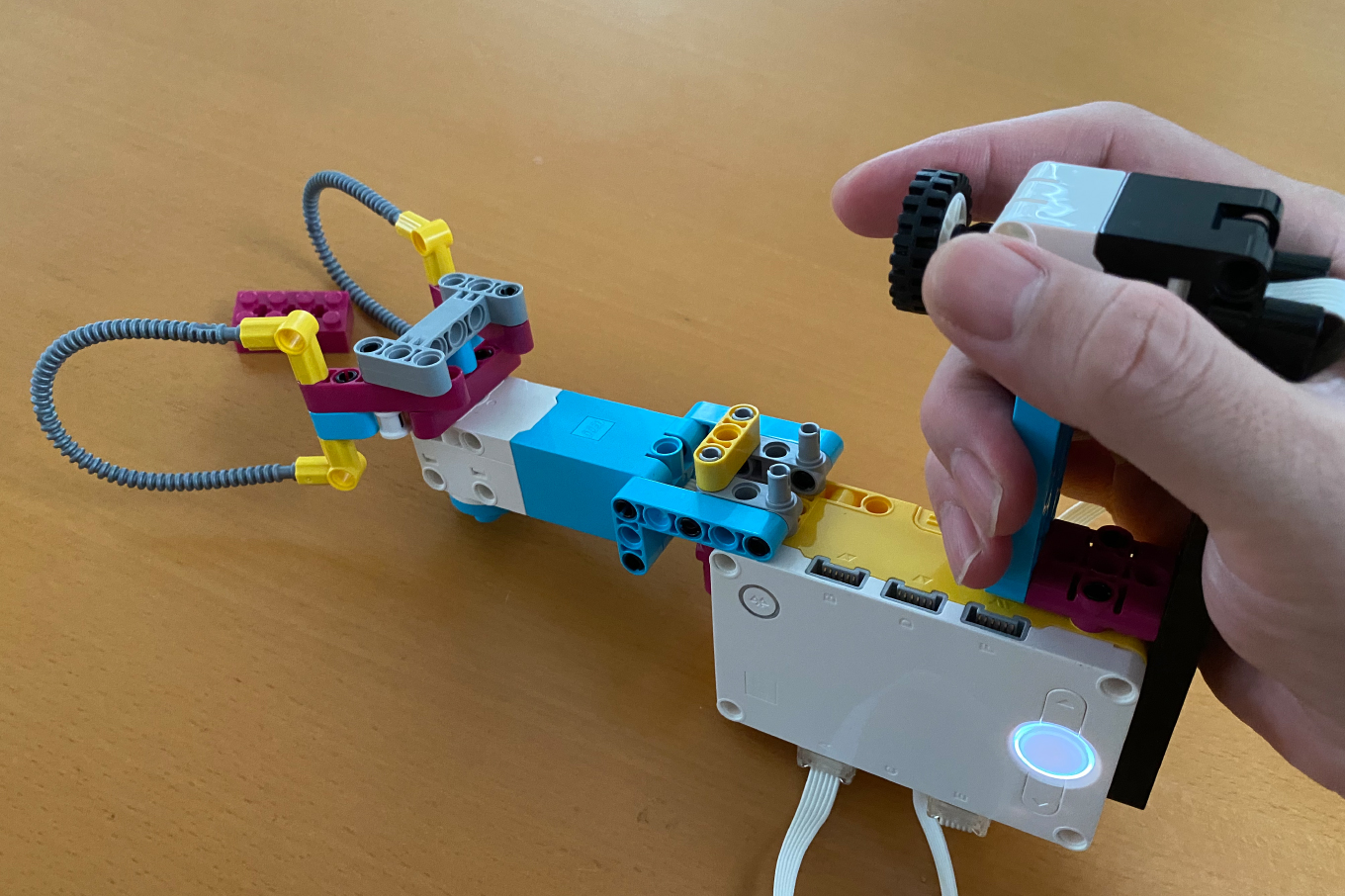
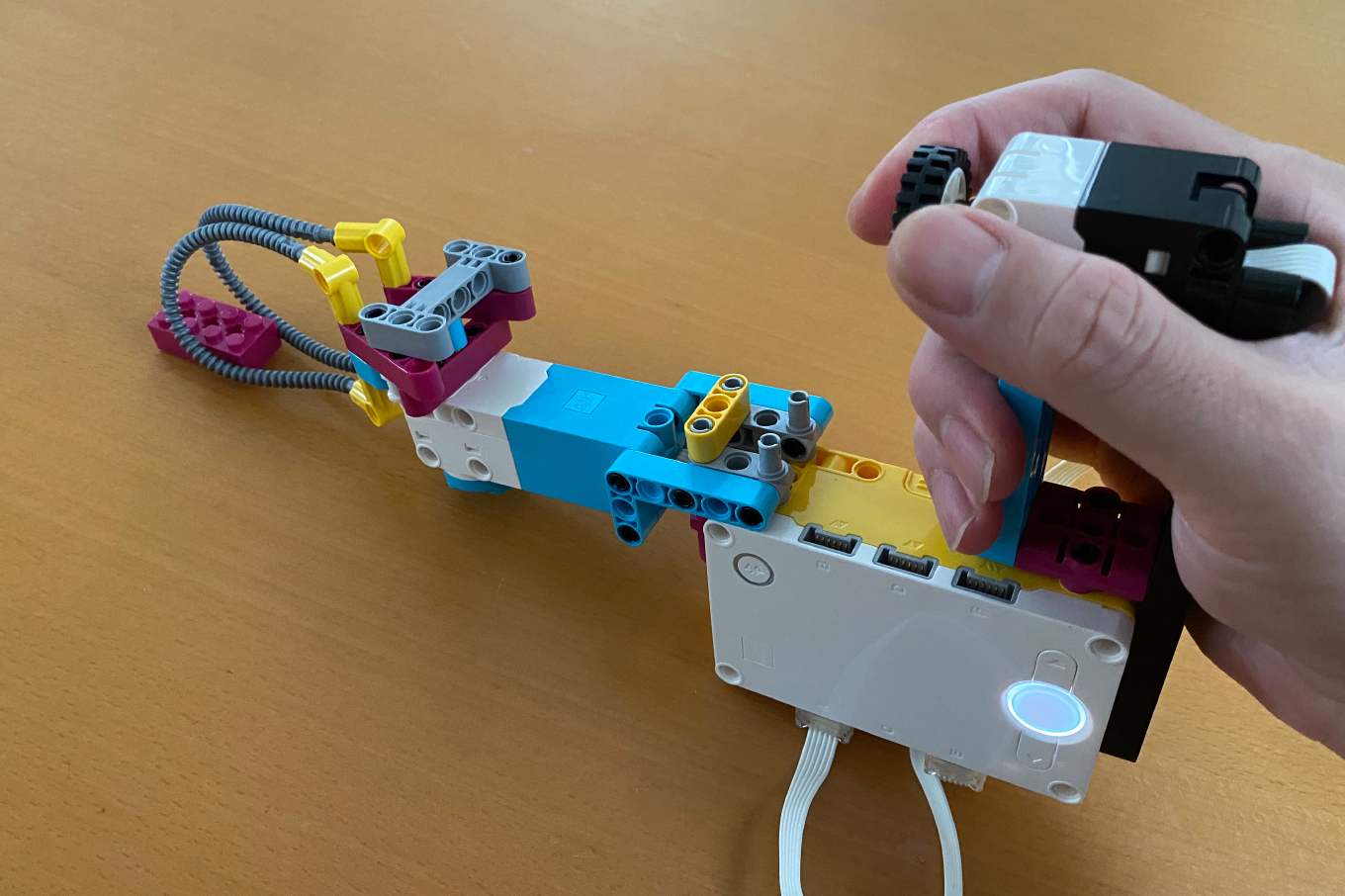
これが掴み取り装置1。モーターがついています
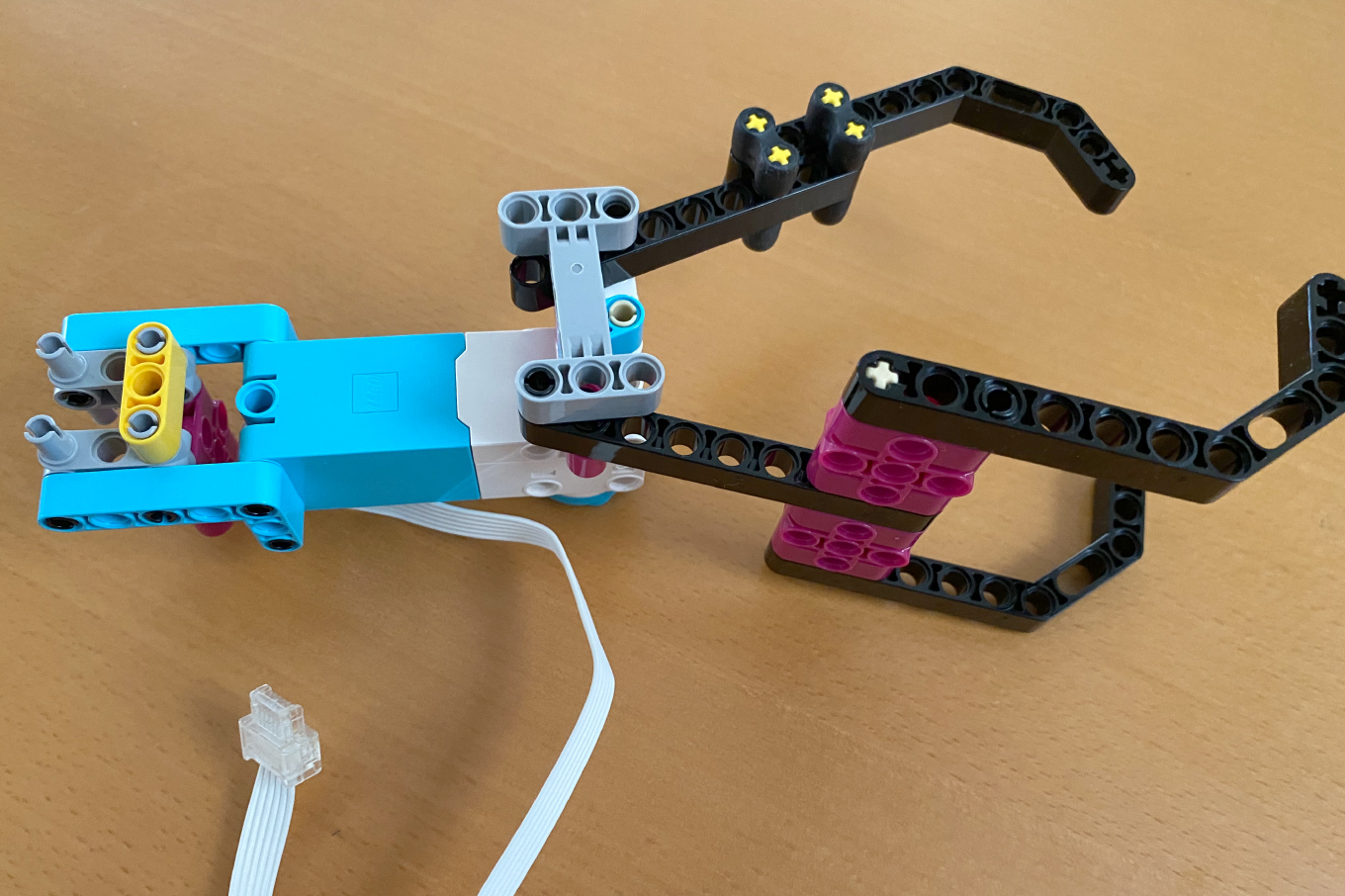
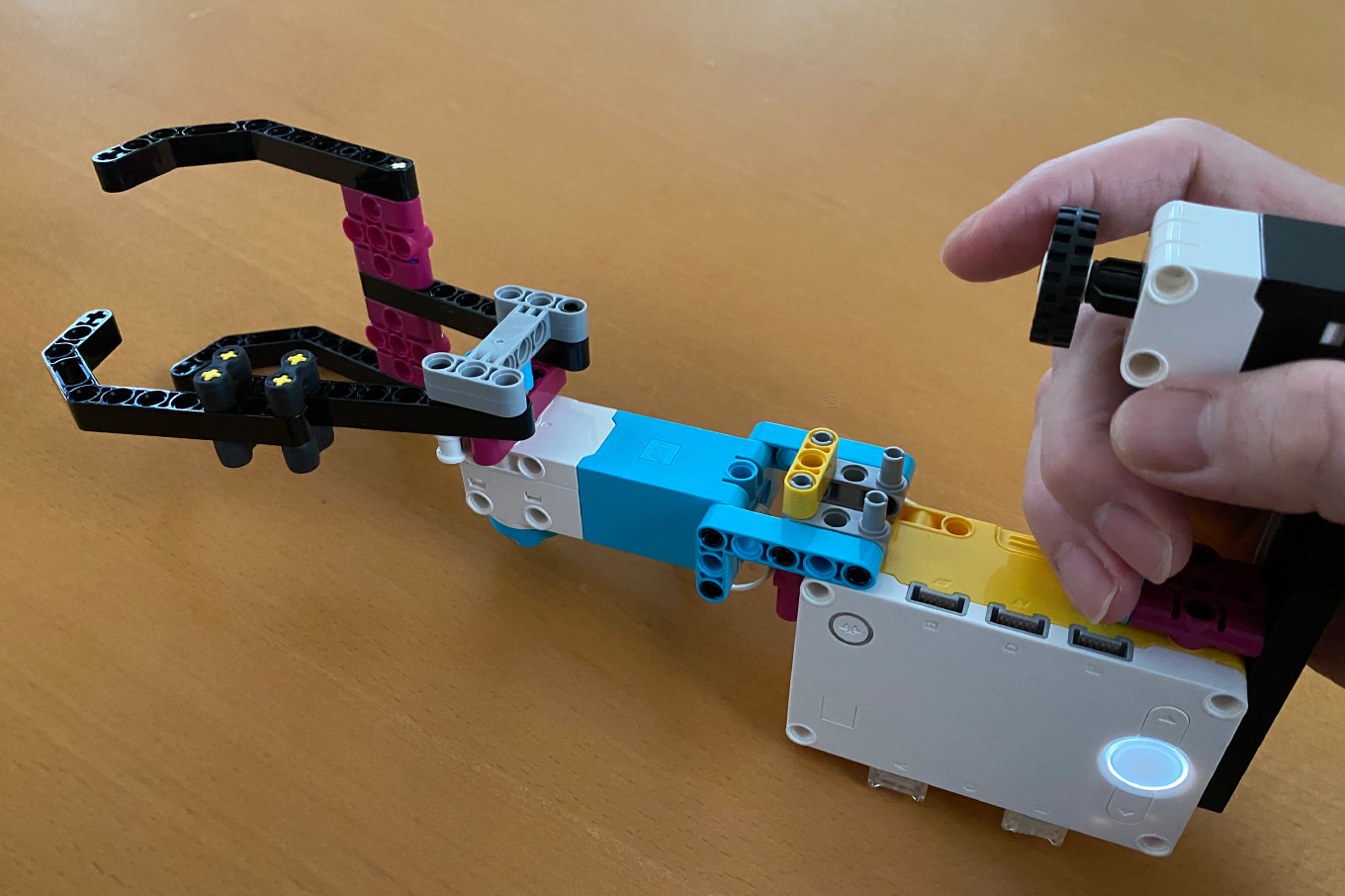
で、これが掴み取り装置2。こちらもモーターがついています
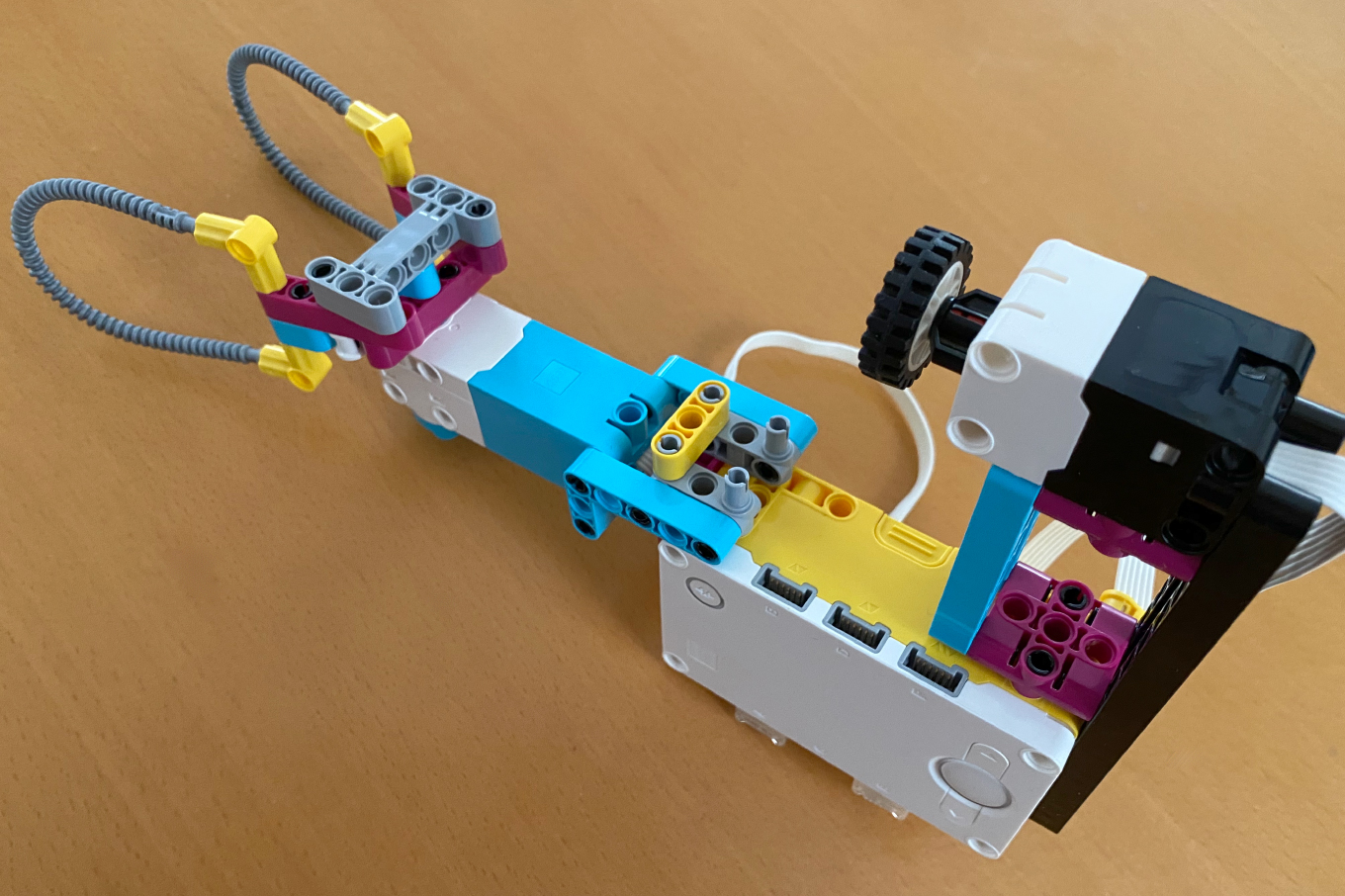
掴み取り装置1の方を本体に繋いでみました
フォースセンサーを押すと・・・
掴みます。ブロックを掴もうと思ったんですが、すべってうまいくいかないです。むずかしい・・・
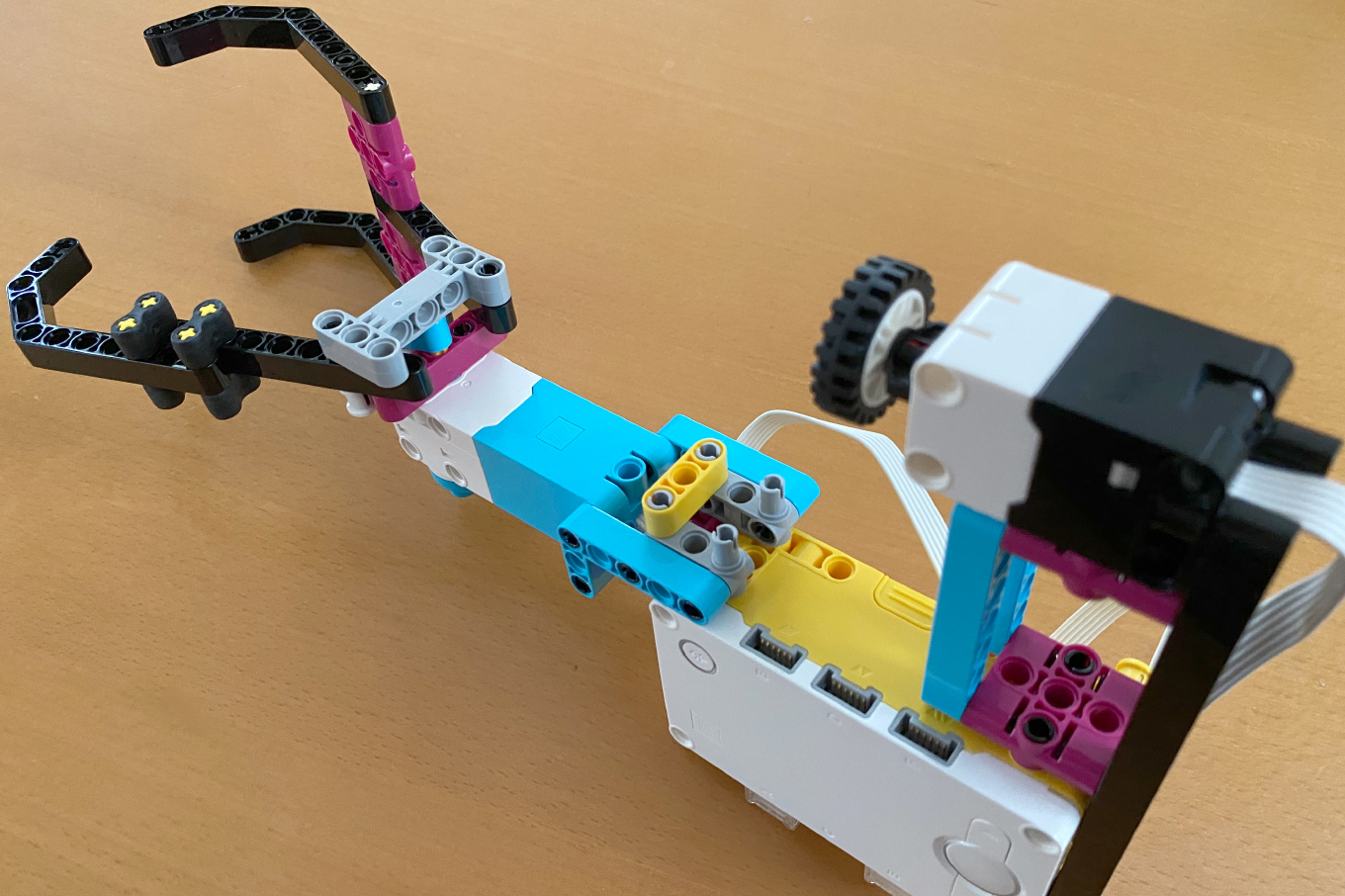
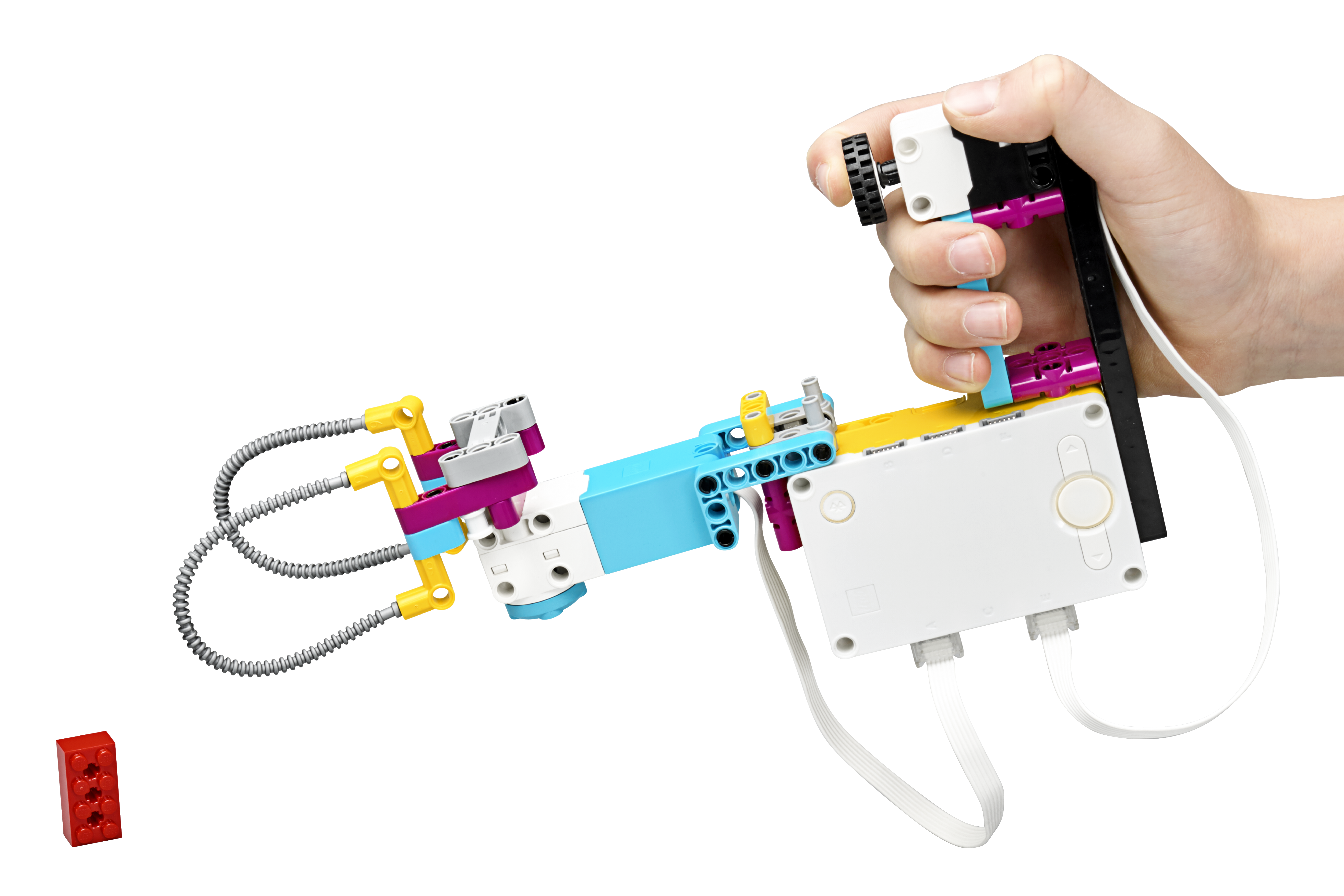
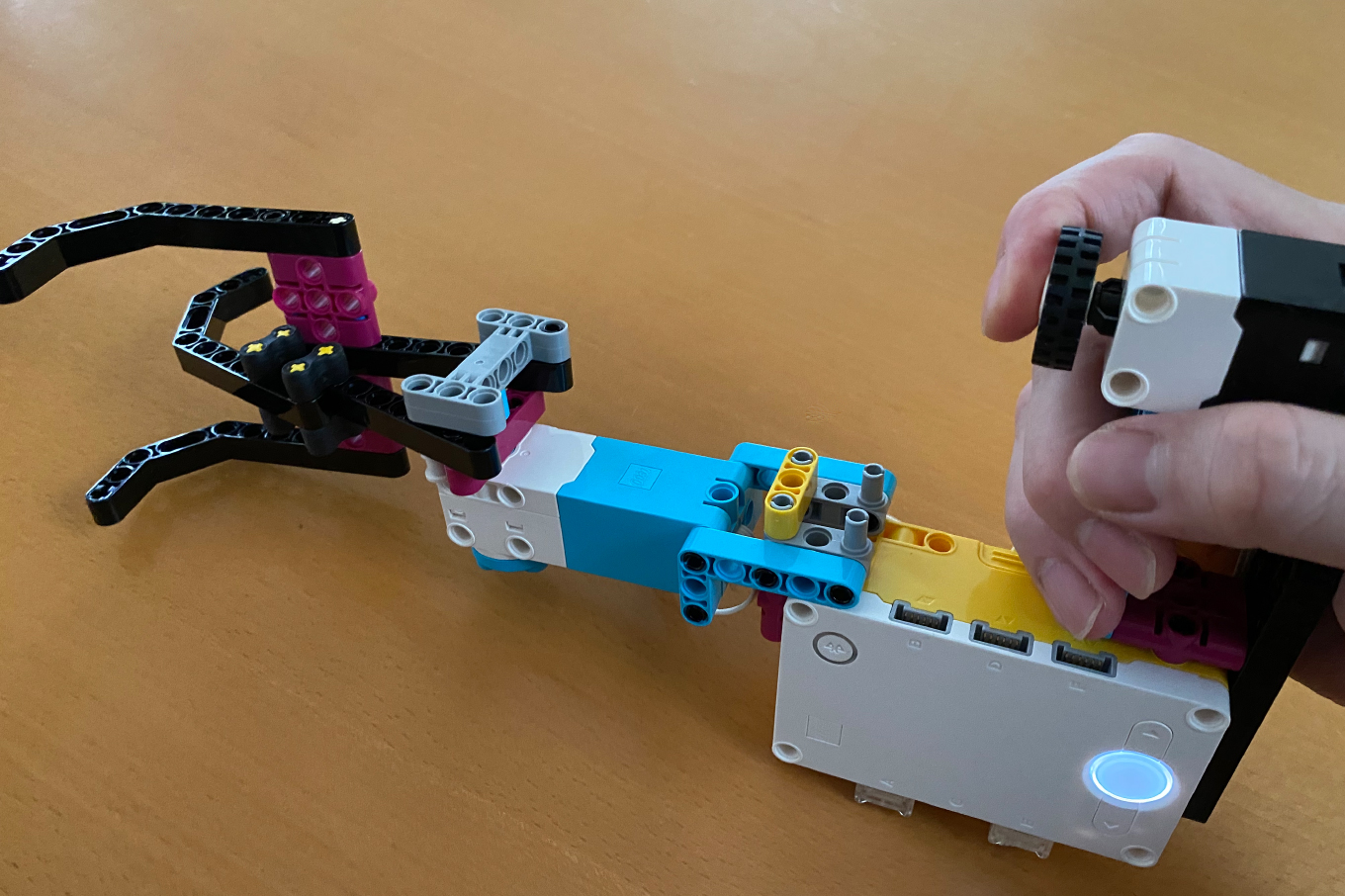
掴み取り装置2の方に付け替えてみました。こっち方がしっかり掴んでくれそうな感じがしますね
同じく、スイッチを押し込むと・・・
ガシャーンと掴みます。マジックハンドみたいな感じ。空のペットボトルくらいなら、うまくつかめます
プログラムはこちら。スイッチを押すとつかむ、離すとつかむのをやめる、というシンプルなプログラムです

Pythonだとこうなります
from spike import ForceSensor, Motor
force_sensor = ForceSensor('E') # フォースセンサー
grabber_motor = Motor('A') # 単一モーター
while True:
# フォースセンサーが押されるまで待機
force_sensor.wait_until_pressed()
grabber_motor.set_stall_detection(False)
grabber_motor.start(-75)
# フォースセンサーがリリースされるまで待機
force_sensor.wait_until_released()
grabber_motor.set_stall_detection(True)
grabber_motor.start(75)
フォースセンサーの圧力を検出すれば、もうちょっと細かい制御ができそうです
[lego-spike]