第16号です。今号は右腕の動作確認作業がメイン。もし正しく動かなければバラしてやり直しという、今までにやってきたことがパァになるという恐ろしい事になります

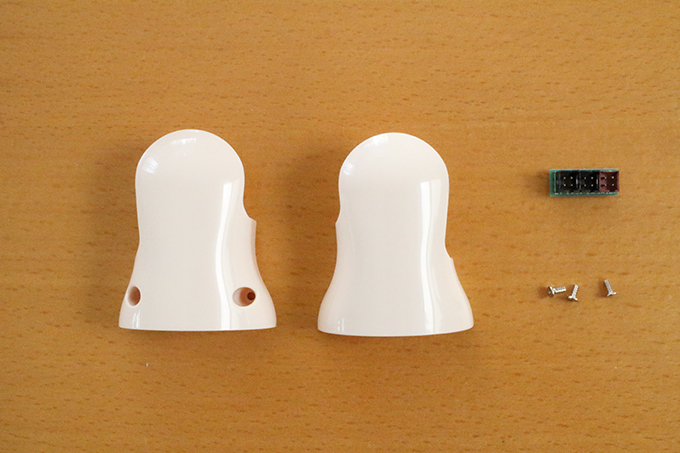
16号の中身は?
- 右上腕カバー(C)
- 右上腕カバー(D)
- 3連ハブ基盤
- 2x4mmビス x 3
マガジンの内容の抜粋です
- 週間ロボットニュース
-超リアルな「カーズ」のしゃべるロボットが発売! - ATOMにできること – ATOMの踊りを楽しもう
今回のアトム
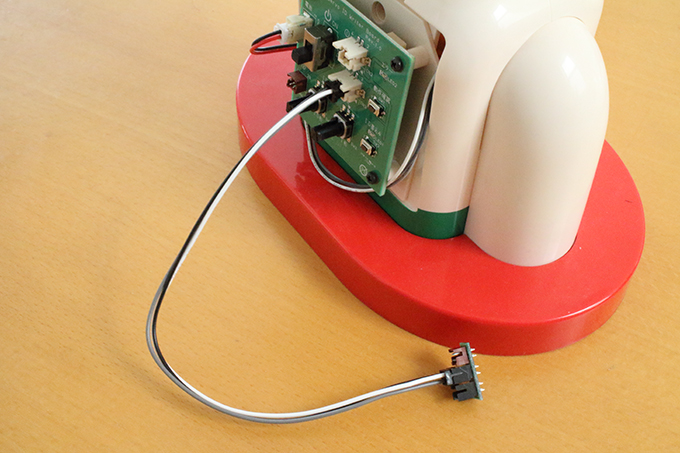
今週号のパーツ
テスト基板用延長ハーネス、チェックスタンド、右腕も使います

チェックスタンドを準備
テスト基板用延長ハーネスをチェックスタンドに取り付けます
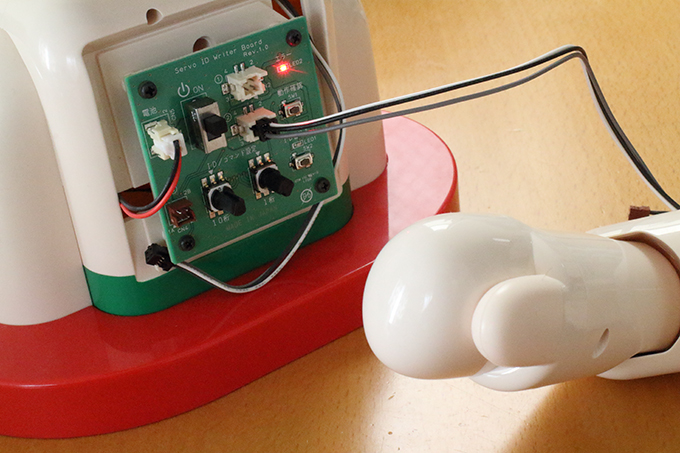
右ひじ用サーボモーター(ID6)の動作確認
右ひじのサーボモーターから伸びているハーネスを3連ハブ基板の黒色のジャックに差し込みます

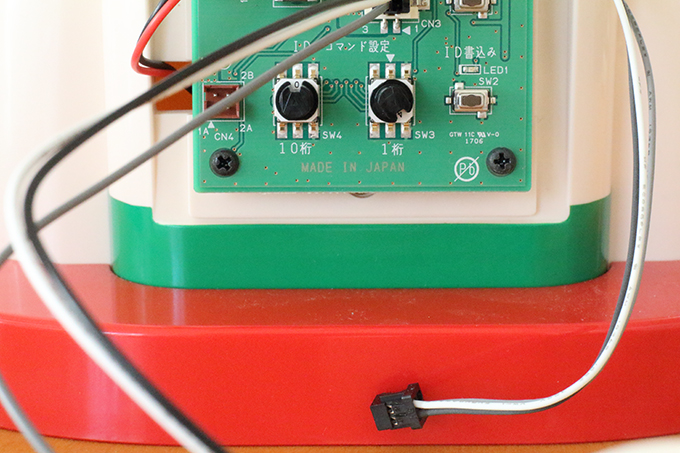
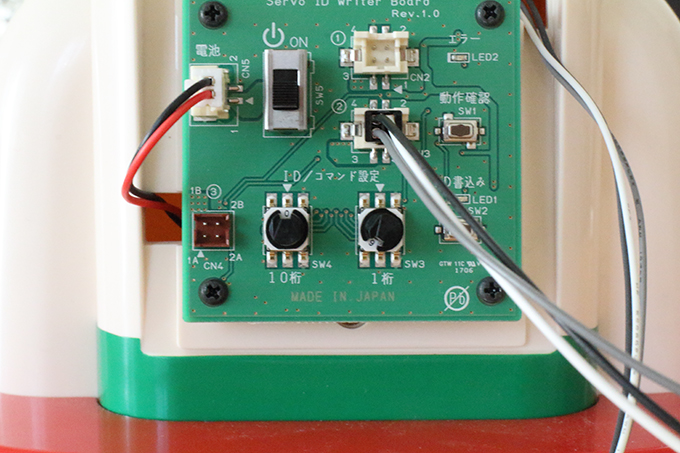
ロータリースイッチを「0」「6」に合わせて電源をONにして「動作確認」ボタンを押します
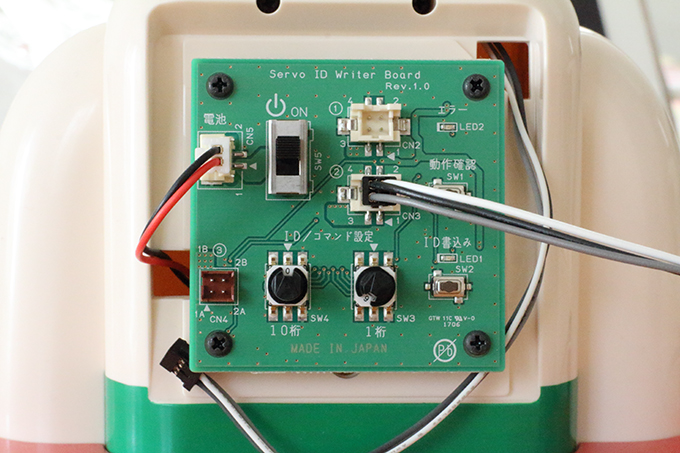
ひじが正しく動作すればOKです

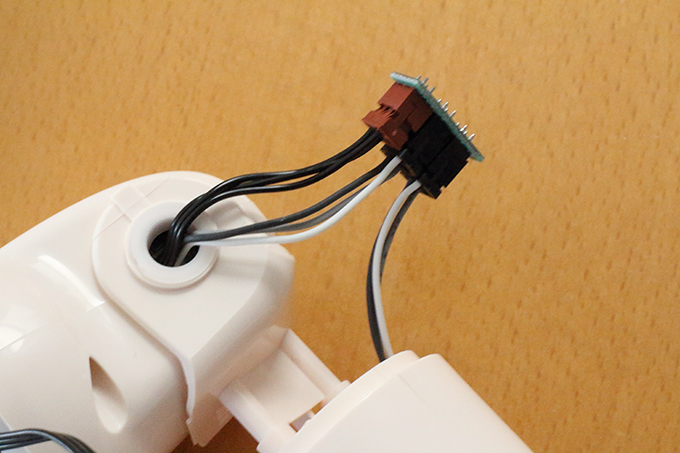
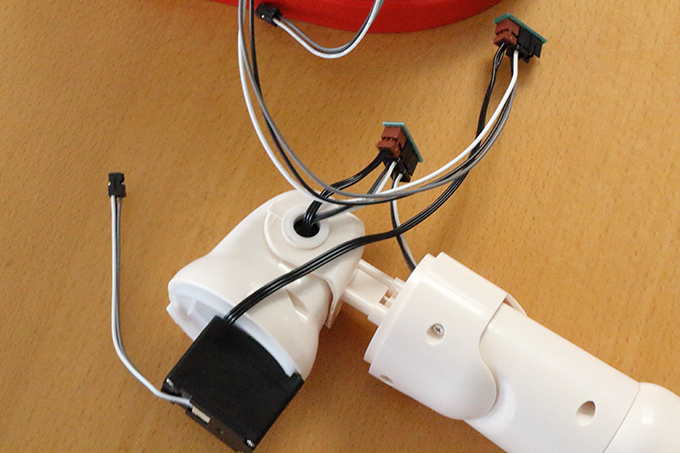
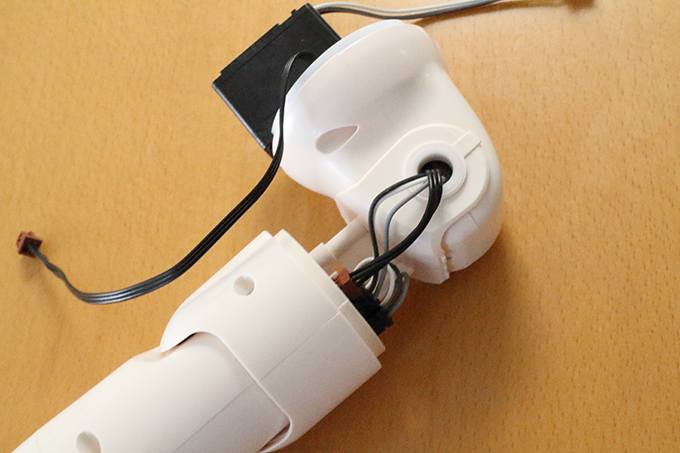
実はID6の動作確認でエラーが出てしまったので、分解して再度組み立て直すハメに・・・一番恐れていた事態が発生です
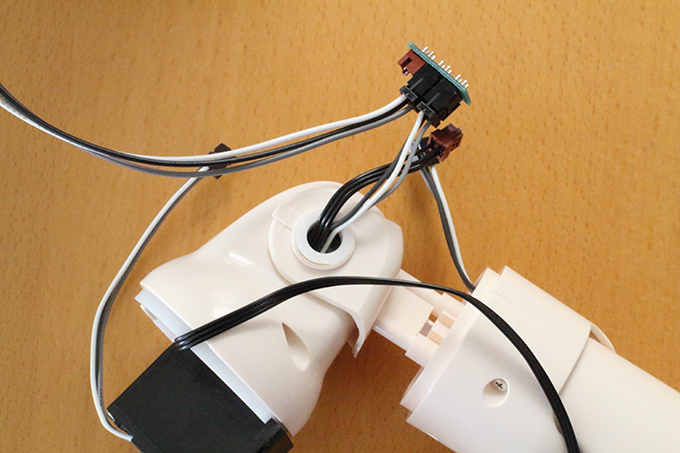
最終的には無事動いたのですが、原因は組み立て方ではありませんでした
改めて作業過程を撮影した写真を見てみると、間違えて茶色のジャックに取り付けています・・・。写真を撮っていなければ、原因の特定は難しかったでしょうね。これで左腕の作業時には絶対に間違えないでしょう(^^;

右上腕用サーボモーター(ID5)の動作確認
右肩のサーボモーターから伸びているハーネスをテスト用基板用延長ハーネスに取り付けます
ロータリースイッチを「0」「5」に合わせて電源をONにして「動作確認」ボタンを押します
上腕が正しく動作すればOKです

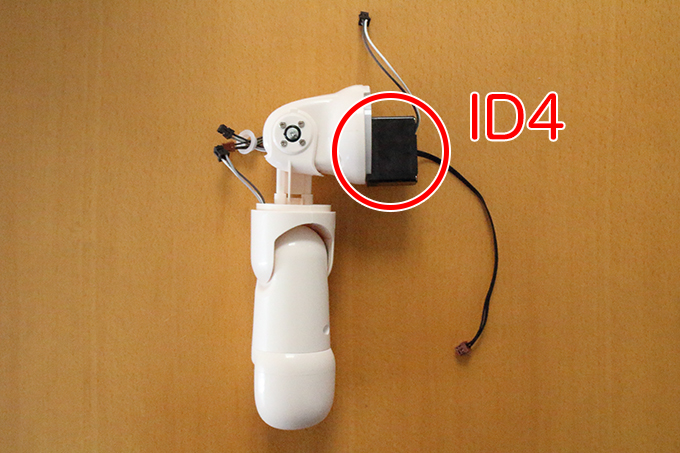
右肩用サーボモーター(ID4)の動作確認
右肩のサーボモーターか伸びているハーネスをテスト用基板用延長ハーネスに取り付けます

ロータリースイッチの「0」「4」に合わせて電源をONにして「動作確認」ボタンを押します
右肩のサーボモーターが正しく動けばOKです
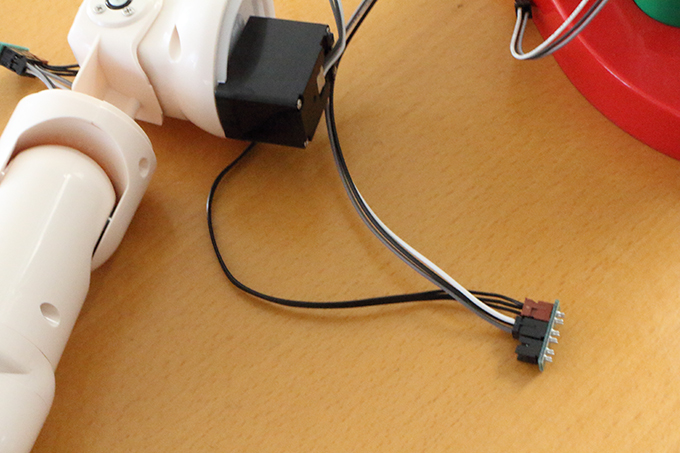
連ハブ基板の取り付け
肩から出ているハーネス2本と、肘から出ているハーネス3本を、今号についていた3連ハブ基板に取り付けます
右肩ディスクから伸びる中継ハーネスをテスト基板用延長ハーネスに取り付けます。今回は茶色のジャックです
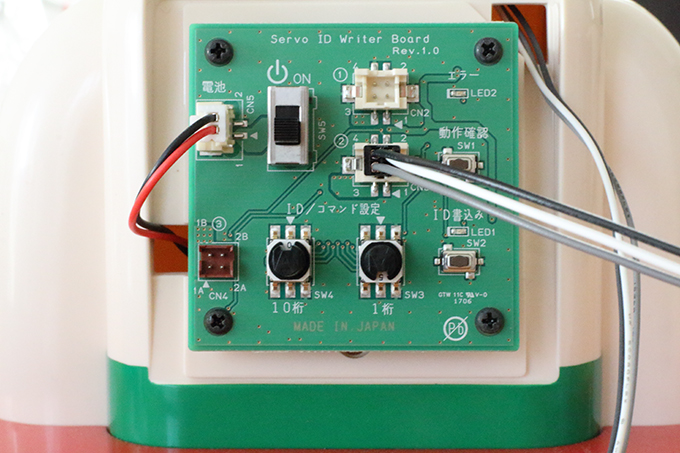
中継ハーネス経由の動作確認
ロータリースイッチを「0」「6」に合わせて電源をONにして「動作確認」ボタンを押します
ひじが正しく動作すればOKです

次にロータリースイッチを「0」「5」に合わせて電源をONにして「動作確認」ボタンを押します
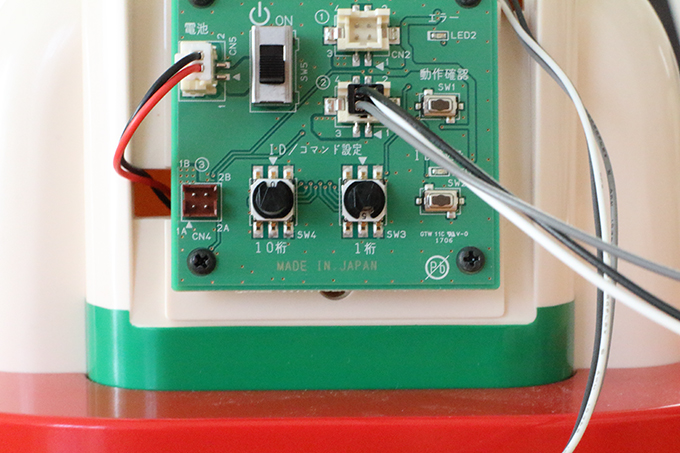
肩にあるサーボモーターが正しく動作すればOKです
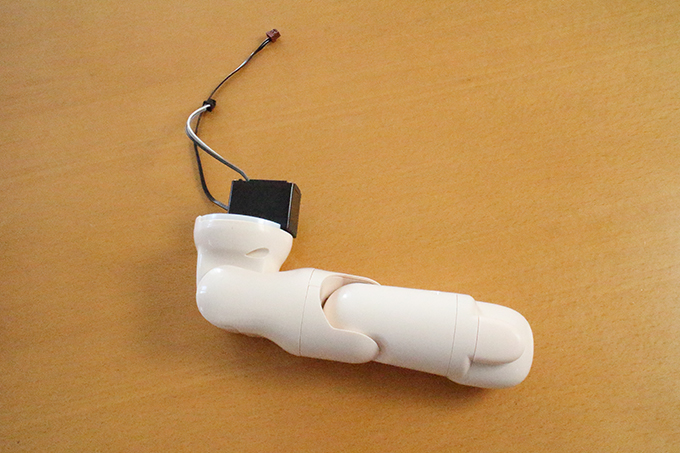
右上腕カバーの取り付け
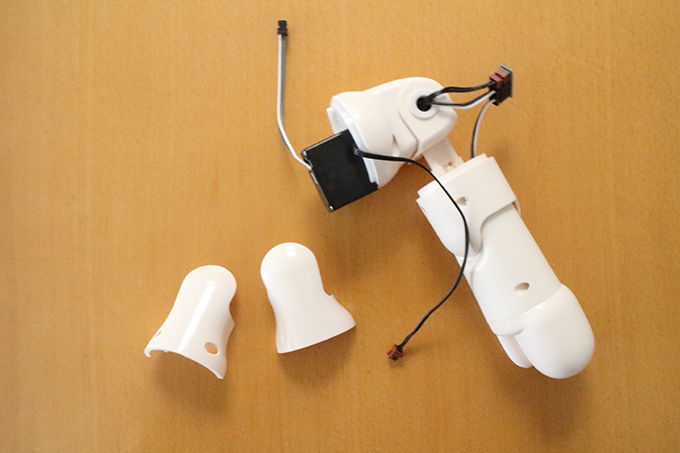
3連ハブ基板を右上腕カバーの中に入れます
ハーネスを挟まないように気をつけて右上腕カバーを取り付けて、ビス留めすれば完成です!
こちらが作り方の動画です
一番最初のID6の動作確認でミスをしましたが、それ以降は問題なく動作したのでよかったです。説明書通りちゃんと作れば、僕みたいな不器用な人間でも大丈夫みたいです